
 Abstract
Abstract
- Multi-agent simulation was used to study several styles of leadership in small societies. Populations of 50 and100 agents inhabited a bounded landscape containing a fixed number of food sources. Agents moved about the landscape in search of food, mated, produced offspring, and died either of hunger or at a predetermined maximum age. Leadership models focused on the collection and redistribution of food. The simulations suggest that individual households were more effective at meeting their needs than a simple collection-redistribution scheme. Leadership affected the normative makeup of the population: altruistic leaders caused altruistic societies and demanding leaders caused aggressive societies. Specific leadership styles did not provide a clear advantage when two groups competed for the same resources. The simulation results are compared to ethnographic observations of leadership in Pacific island societies.
- Keywords:
- Leadership, Reciprocity, Pacific Island Societies, Norms
Introduction
- 1.1
- Chiefdoms represent an intermediate step between our presumed egalitarian past and the nation states that dominate the modern world (Carneiro 1970, 1981). However, the authority and power of chiefs varied widely with the size and culture of the group, from nearly-egalitarian bands to highly structured bureaucracies. This paper uses multi-agent simulation to examine some features of leadership in small indigenous societies using the islands of Oceania as ethnographic comparisons.
- 1.2
- Anthropologists identify several types of leadership and social stratification in the Pacific (Cordy (1986), Goldman (1955, 1970), and Sahlins (1958, 1963). Cordy (1986) uses the levels of bureaucratic organization to characterize stratification in Micronesia. Goldman (1955, 1970) focuses on the means by which a leader assumes and maintains power, whether by traditional inheritance, open competition, or through a highly stratified bureaucracy. Sahlins (1958) takes an economic perspective and examines the manner in which food is produced and distributed to the population. All recognize the basic distinction between ascribed leadership, where a person is nominated to a defined position, and achieved leadership, where personal characteristics are the justification for authority.
- 1.3
- As an adjunct to the categorization of ethnographic observations and to help interpret the results of social simulations, it is useful to place discussions of indigenous chiefs in a broader theoretical framework. In Leader-Member Exchange theory, Graen and Uhl-Bien (1995) take a systems approach, broadening their focus from the characteristics of the leader alone. They divide leadership into three domains: leaders, followers, and the relationship that connects the two. From an anthropological perspective, the relationship includes the manner in which a leader's authority is justified, his or her responsibilities as leader, and the responsibilities of the followers to the leader. From the standpoint of social simulation, the relationship may include the set of rules in the simulation that connect the leader agent with those under his control.
- 1.4
- Viewing societies as complex adaptive systems, Uhl-Bien and Marion (2009) developed the concept of Complex Leadership Theory that describes leadership styles as administrative (bureaucratic or top-down direction), enabling (focused on enhancing individual contributions), and adaptive (creation of new systems and functions). Within this structure, Pacific societies tend to fall into the first two divisions—administrative and enabling, as will be discussed below.
- 1.5
- Many small societies—those with fewer than 1,000 members—were egalitarian, i.e. they lacked strong centralized leadership. Boehm (1993, 1999) argues that this was often not accidental and that members used active measures to ensure against upstarts. Sahlins (1958) and Earle (1997) note that leaders in small societies seldom improved the economic performance of individual households and that other motivations, including the desire for prestige and power, stimulated one person to seek control over the actions of others. Whereas Service (1975) saw leader-directed collection and distribution of food as a prime function of chiefs, Sahlins (1958) and Earle (1997) saw it as a means to an end.
- 1.6
- The economics of small groups may be divided into three categories: immediate consumption by the individual, reciprocal sharing between individuals, and centrally directed collection and redistribution (Fried 1967). In previous papers (Younger 2003, 2005), I examined the role of reciprocal sharing in food distribution, finding (not unexpectedly) a positive benefit from cooperation between individuals. In this paper, I use similar methods to assess simple forms of leader-directed collection and redistribution. Four specific questions will be addressed:
- Does a simple form of leader-directed collection and redistribution improve the performance of a small society and, if so, in what ways?
- Are certain combinations of leadership qualities more effective or more damaging than others?
- Over the long term, does the method by which a leader is chosen affect social performance?
- Do certain leadership characteristics give a group a competitive advantage over another group?
- 1.7
- The intent of the paper is to use multi-agent simulation as an aid to the interpretation of ethnographic observations so as to lead to a richer understanding of leadership in Oceania.
 Pacific Island Societies
Pacific Island Societies
- 2.1
- Among all small societies, islands may be the most fruitful for the study of certain types of human behavior. Pacific islands in particular offer the scientific advantages of isolation, variability across a wide range of environments and social organizations, and sufficient data to enable comparison and analysis. The smallest islands in the Pacific—some measuring only a few square kilometers in area—were necessarily sedentary (there was nowhere to go on the most isolated islands) and agricultural but they had aspects of foraging cultures in that there was near-continuous harvesting of taro from fixed patches and protein from the sea. For islands more than 100 km from their nearest neighbors, there was infrequent contact with other groups, making them useful test cases for comparison to simulations.
- 2.2
- The characteristics of leadership on small islands varied with population. On Nukuoro (population about 140), Sikaiana (population about 180), Kapingamarangi (population about 450), and Pukapuka (population about 600), individual households managed their own food supply (Younger 2008). The chief's power was highly circumscribed and if he attempted to push the limits of his authority he might be removed from office or even killed. Real power was held by a council of older men or, the case of the smallest islands, by all adults. Decisions mainly concerned activities that required group engagement, such as garden maintenance, and chiefs did not intervene in individual lives. On Tikopia (population about 1200), chiefs controlled the distribution of surplus production, but households were still the principal providers of their own needs. On very large islands, such as Hawai'i (population about 100,000), a complex hierarchy developed with chiefs having absolute control of the land and its products. Household production was directed and monitored by the chief. A multi-layer bureaucracy enabled the paramount chief to control large areas, including other islands.
- 2.3
- Hereditary rank was the dominant legitimizing principle of political leadership in much of Polynesia and Micronesia. On the smallest islands, land rights were closely tied to the descent lines of the original settlers. Inheritance of title to secular authority had the dual role of justifying the exercise of power by a chief and of suppressing conflict over succession. However, while much was made of inheritance as a justification for position, chiefs were expected to perform various functions and to take care of their followers (Watson-Gegeo and Feinberg 1993). Also, as noted by Goldman (1955), even genealogy-minded Polynesians were permitted some latitude to compete for positions and incompetent chiefs could be removed. Chiefdoms were usually local and on larger islands it was common to have several competing chiefs (Peterson 2000). Political unification on the larger islands was relatively rare, achieved on Hawaii and Tonga relatively late in their development.
- 2.4
- Another form of leader selection, common in Melanesia, was the Big Man scheme (Oliver 1955, Sahlins 1958). Here a person achieved de facto leadership of a group through conspicuous generosity, essentially building a bond of obligation between himself and his followers. His power was not inherited, and conflict was common during leadership transitions. While anyone could aspire to be a Big Man, the leadership pool was in fact limited to those families with sufficient wealth to permit lavish gift-giving.
- 2.5
- In the context of Complexity Leadership Theory, the smallest, most egalitarian societies in the Pacific were enabling in nature—the chief had little power and the population had a strong voice in community actions. His role was to coordinate for the common good. These were among the most adaptive societies in the Pacific, adjusting the cultural system that they brought with them to the particular environmental situation that prevailed there. The largest islands were closer to the administrative category, strongly bureaucratic in the top-down management of a large and complex environment. As stated by Uhl-Bien et al (2007: 301), "complexity science suggests that organizations must increase their complexity to the level of the environment." Small islands demonstrate that the reverse is also true—organizations can decrease complexity in response to less complex environmental conditions.
Simulation Method
- 3.1
- Rule-based multi-agent simulations have been used to study a variety of social processes, including altruism (Jaffe 2002), normative reputation (Castelfranchi et al 1998), and tolerance (Younger 2005). Neumann (2008) surveyed several agent-based models of normative behavior, focusing on the challenges of representing norms within a rule-based simulation and how these norms are transmitted between agents. Relevant to the present study, Gigliotta et al (2007) simulated groups of agents with a leader. Hazy (2007) reviewed fourteen approaches to the computer simulation of leadership in contemporary organizations and identified a number of common elements.
- 3.2
- I used the MICROS code to study a population of independent agents acting according to a fixed set of rules laid down at the start of each run. A detailed discussion of this code, including its application to social processes such as reciprocity, reputation, sanctions, and interpersonal violence, can be found in my previous papers (Younger (2003, 2005, 2004, 2005a, 2005b)). To enable assessment of how the code operates, I provide pseudo-code in an appendix to this paper.
- 3.3
- The agents inhabited one of two environments, the first (Figure 1) containing one village and four sources of food and the second (Figure 2) containing two villages and seven sources of food. The single village environment was used to study the effects of different leadership styles on a population. The two-village environment was used to study the interaction of two autonomous polities. In this case each village laid claim to four food sources, the one in the middle of the environment being contested, i.e. claimed by both villages. (The effect of a "contested" food source will be described below.) Each of these environments was divided into a square grid, the one-village case into a 20x20 grid and the two-village case into a 30x30 grid. These grids provided the coordinates for agents, food sources, and villages. Agents occupied a place on the grid and more than one agent could occupy the same location. The boundaries of the environments were reflective so that when an agent reached an edge it turned and went in another direction, giving the environments the characteristics of islands.
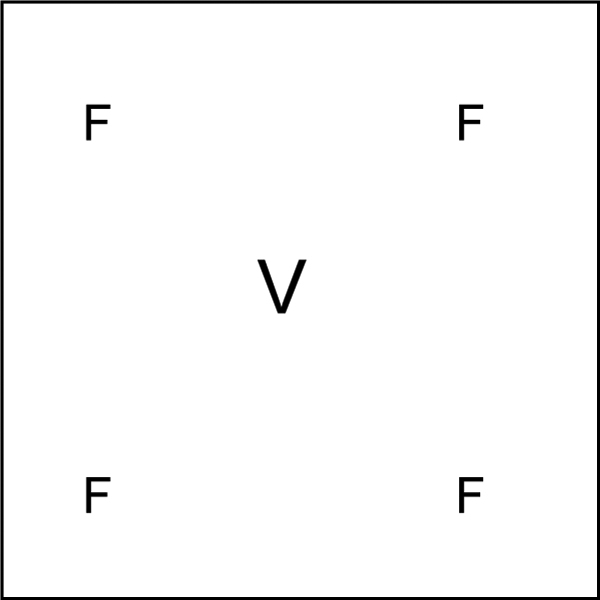
Figure 1. One village environment. V refers to the village, located at grid coordinates (10,10). F refer to the food sources, located at grid coordinates (5,5), (5,15), (15,5), and (15,15). 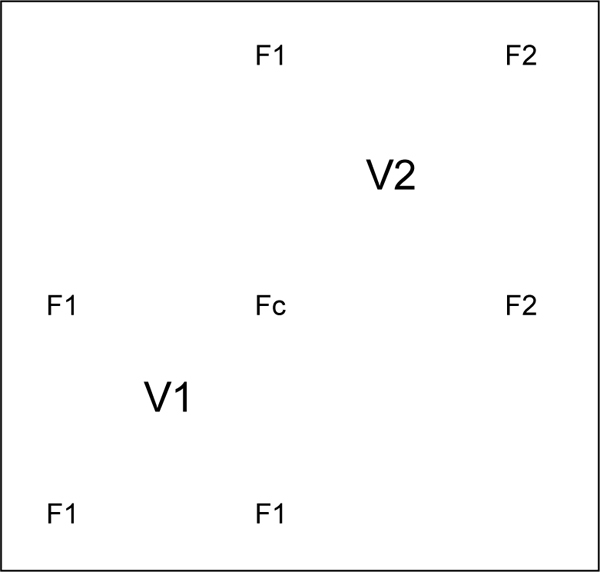
Figure 2. Two village environment. V1 and V2 refer to the villages, located at grid coordinates (10,10) and (20,20). F1, located at grid coordinates (5,5), (5,15), and (15,5), are food sources claimed by Village 1 and F2, located at grid coordinates (15,25), (25,15), and (25,25), are food sources claimed by Village 2. Fc, at grid coordinates (15,15), is a contested food source, i.e. it is claimed by both villages. - 3.4
- The initial population was equally divided between male and female agents and was randomly scattered across the environment. In the two-village case, equal numbers of male and female agents were assigned to each village.
- 3.5
- Time was measured in arbitrary units. A "day" consisted of 48 units of time, during each one of which an agent could move one square, eat, communicate, fight, or mate. An agent was permitted to live a maximum of 4000 time units before it died of old age. If one time unit is considered to represent one half hour of human time, then an agent's maximum life expectancy was very short—2000 hours or 83 days. This choice was made to shorten the amount of computer time required to conduct the many simulations described in this paper. The intent of the simulations was to look at the effect of leadership on social performance over many generations of agents. I believe that it was more important to achieve the proper level of granularity of agent decision and to allow a sufficient number of different agents to add to the statistics than to track repetitive actions of a given agent over a long lifetime.
- 3.6
- To avoid having many agents simultaneously die of old age, the ages of the agents in the initial population were evenly distributed over the range 0 - 2000 time units. The order in which agents acted was scrambled at the start of each step in time to avoid spurious patterns of agent interaction.
- 3.7
- Agents required food to live. Their need for food increased by one for each unit of time and if this need exceeded 200 then the agent died of starvation. The limiting factor in the size of the population was the finite supply of food in the environment. For the one-village environment each of the four food sources was replenished at a rate of 12.5 food units per unit of time, sufficient to support a population of 50 agents. For the two-village environment, each of the food sources was replenished at 12.5 food units per unit of time except for the one in the center of the environment which received 25 food units per unit of time. Thus the two-village environment could sustain an average population of 100 agents, divided between the two villages. Food was persistent, so that food points unused at one time remained for use in the future. A village size of 50 is within the bounds of the minimal social unit discussed by Wobst (1974) and comparable to village sizes in the Trobriand Islands (Powell 1960), and many gathering bands (Kelly 1995). Since the area of the two-village environment was 2.25 times the area of the one-village environment, the population densities of the two environments were similar.
- 3.8
- During each unit of time each agent proceeded through the following decision process (details of each step will be given below):
- It sensed its environment to note the location of other agents, food sources, and villages. An agent could sense objects up to five squares in each direction, far enough to see some, but not all, of the environment. When an agent sensed something, it placed the details of the object in its memory for later use. Specifically, when an agent sensed a food source it remembered the amount of food at that source and the time at which the observation was made.
- If the agent was collocated with other agents it could share food that it was carrying or steal food from another agent.
- If the agent was collocated with another agent, then it shared its opinion of the normative reputations of all of the other agents.
- If the agent was collocated with its mate, then it attempted to procreate.
- If the agent was under orders from a leader, then it carried out those orders.
- If the agent was not under orders, and if its need for food exceeded half of the maximum value of 200 units, then the agent consumed food that it was carrying, moved toward a food source or, if already at such a source, consumed food there. After consuming food at a food source, the agent would pick up a maximum of 100 food units to carry with it.
- If the agent was not under orders and it was not hungry then it explored the environment by taking one step in a random walk.
- If the clock governing time was greater than 36 time units, or 75% of the length of a day, then the agent returned to its home village.
- 3.9
- Other rules could be investigated and some variations are described in Younger (2003, 2005). The methodology used here was chosen as a compromise between simplicity, important in isolating the effects of specific behaviors, and a more detailed representation of a given culture.
- 3.10
- The normative character of an agent was described in terms of three parameters: an altruism parameter Ai, an aggression parameter Gi, and a fighting ability parameter Fi, all of which were in the range of zero to one. Agents in the initial population were assigned random values of each parameter.
- 3.11
- The altruism and aggression parameters controlled an agent's sharing and stealing. If an agent was carrying food and (agent hunger / 200) < Ai then that agent shared its food with other agents at the same location. (Recall that an agent died when its hunger exceeded 200 units.) A large altruism parameter meant that an agent would share frequently and a small altruism parameter meant that it would share only if its own hunger was very low. (Sharing depended on the state of the agent with the food, not on the need of the potential recipient.) When an agent shared it gave an equal amount of what it was carrying to each individual at its location, keeping a share for itself. In the case of a two-village environment, agents from the other village received only one half of a normal share, a form of in-group favoritism.
- 3.12
- Theft was similarly dependent upon the situation in which the agent found itself. An agent who was not already carrying food would attempt to steal all of the food carried by a collocated agent if (agent hunger / 200) > Ai and (agent hunger / 200) > (1 - Gi), where the parameters again refer to the stealing agent and not the victim. Whether theft actually occurred depended on the fighting strength, Fi, of the agents. If F thief > Fvictim, then theft occurred. Otherwise, the thief was unsuccessful in taking food from the owner. The first test implied that agents with small altruism parameters were more likely to steal than agents with large altruism parameters. The second requirement was established so that an agent's innate aggression was a factor in theft. An agent with a high aggression parameter was more likely to attempt to steal than an agent with a low aggression parameter. Having determined the intent, the fighting strength decided the outcome.
- 3.13
- Agents could not sense the normative parameters of other agents. Prior to interaction, they did not know whether they were likely to be the recipient of sharing or the victim of theft. To allow the agents to keep track of the behavior of other agents I defined an interaction matrix, imx(i,j). When agent i shared x units of food with agent j then x points were added to imx(j,i). When agent i stole x units of food from agent j then x points were subtracted from imx(j,i). The diagonal elements of the interaction matrix constituted a form of individual prestige, which will be discussed below.
- 3.14
- Generous agents, i.e. those with high altruism parameters who shared frequently with other agents, developed large positive interaction matrix elements during the course of their lives. Agents who stole developed negative interaction matrix elements.
- 3.15
- Sharing was a ubiquitous feature of small societies. In groups that depended heavily on the hunting of large game, sharing served to distribute asynchronous acquisitions to the community in a way that ensured that each person received some nourishment on a regular basis. However, sharing has also been observed in cases where food is abundant and where a single household or even a single individual can procure all that he or she needs. In these cases, sharing helped to maintain social solidarity by creating a network of mutual obligation within the society. Each person gave not in the expectation of immediate return but to create an obligation in the mind of the recipient, an obligation that could be called upon in the future. This was particularly true on many Pacific islands where the sharing of commonly available foods was frequent.
- 3.16
- Sharing and theft were included as symmetrical normative behaviors that were simple to simulate. While private property was not a dominant concern in many small societies, there were occasions when thefts could result in serious ill-will. Oliver (1974) noted that thieves might be killed in ancient Tahiti. Theft of garden produce, particularly during times of scarcity, led to the imposition of harsh penalties on Pukapuka (Goldman 1970). McArthur (2000) notes that theft provoked disputes among the Kunimaipa.
- 3.17
- In the two village environment, when an agent took food from a food center claimed by the other village (including the contested food source) an amount equal to the food removed was deducted from the interaction matrix elements of any agents of the owning village who were collocated with the theft. This deduction was distributed over the agents present. This feature constituted a form of in-group favoritism wherein negative reputation was gained by taking food from a food source claimed by another village.
- 3.18
- The interaction matrix element constituted a form of individual normative reputation for each agent. Depending on the history of its interactions, a given agent might have been viewed negatively by one agent and positively by another. Thus if agent i was very hungry and stole from agent j, then agent j would have a negative opinion of agent i. If, later, agent i was not hungry and shared some of the food that it was carrying with agent k, then agent k would have a positive opinion of agent i. It was possible for a given agent to change its opinion of another agent, such as when it was the victim of theft by an agent that had previously shared. All reputations were individual in nature—there was no group labeling wherein an agent might be considered positively or negatively based on the village to which it belonged.
- 3.19
- The diagonal elements of the interaction matrix element, imx(i,i), represented individual prestige. When an agent shared, the amount shared was added to its prestige. However, the amount that an agent stole was also added to its prestige, indicating a degree of power over others esteemed in some small societies (Younger 2009). Normative reputations were communicated between two collocated agents by averaging the interaction matrix elements that connected them to each of the other agents in the population. If agents i and j were collocated and at least one of them had an opinion of agent k (i.e. a non-zero interaction matrix element) then each would adopt a new opinion of agent k via the formula:
imx(j,k) new = imx(i,k) new = ½(imx(j,k) old + imx(i,k) old ). - 3.20
- The communication of normative reputation gave an agent the opportunity to learn something about the past behavior of another agent without having to have direct experience with that agent (Castelfranchi et al 1998). A simple average was used under the assumption that an agent with no experience of another would not be as strongly affected by that agent's past behavior while an agent who had suffered or benefited from an interaction might be willing to be influenced by the experience of others. Other weightings could be used; the subject of normative reputation is a research area unto itself. Note that neither agent communicated its own reputation.
- 3.21
- Many factors beyond sharing contributed to social solidarity, including kinship, residence patterns, external threats, etc. However, for the purpose of this simulation, I defined social cohesion as the total mutual obligation of a society, the sum of all of the interaction matrix elements connecting the agents in a defined group (a village, or the total population), thus capturing the combined effects of sharing and theft. Since mutual obligation was a product of the interaction of different agents, the diagonal terms in the interaction matrix, corresponding to individual prestige, were not included in this sum. Mutual obligation was high for a population in which sharing was frequent and in which theft was rare. Conversely, mutual obligation was strongly negative when sharing was infrequent and theft was common.
- 3.22
- Upon reaching the minimum reproductive age of 1000 time units, a female chose as her mate the unattached male with whom she had the highest interaction matrix element, i.e. the male with the best "reputation" as I have defined it. Given how the interaction matrix was defined, a female chose the male who had been most generous and who had stolen the least. There was an advantage to this choice, since such a mate was more likely to share food with the female and was less likely to steal from her. Mating was monogamous, as was the case in most small societies (with the important exception of leaders, who were sometimes polygamous). Agents could mate with members of another village, but once the attachment occurred, the female transferred to the male's village and followed the male as he moved about the landscape. If either mate died, then the survivor was free to choose or be chosen as a mate. Mating and reproduction represented a form of interdependence within the agent population, a necessary condition for complex dynamics in society (Uhl-Bien and Marion 2009).
- 3.23
- Collocated mated agents between the ages of 1000-3000 time units could produce offspring. During each time unit there was a probability of 0.0025 that conception would occur. Given that a female was fertile for 2000 time units, this resulted in an average of five births per female, consistent with Pennington's (2001) tabulation of observed fertility rates among many small indigenous societies. I experimented with various values of the birthrate: too low a value would not sustain the population and too high a value would result in a population explosion which would rapidly exhaust the food supply.
- 3.24
- Offspring appeared immediately, without any gestation period, and were required to remain with their mother for the first quarter of their lives. They were assigned to the village of their parents. The normative parameters of the new agents were assigned by the following method:
Altruism parameter Ai: 1/3 chance of inheriting 1/2(Amother + Afather) - 0.1 1/3 chance of inheriting 1/2(Amother + Afather) 1/3 chance of inheriting 1/2(Amother + Afather) + 0.1 Aggression parameter Gi: 1/3 chance of inheriting 1/2(2Gmother + Gfather) - 0.1 1/3 chance of inheriting 1/2(2Gmother + Gfather) 1/3 chance of inheriting 1/2(2Gmother + Gfather) + 0.1 Female value reduced by 50% Fighting parameter Fi: 1/3 chance of inheriting 1/2(2Fmother + Ffather) - 0.1 1/3 chance of inheriting 1/2(2Fmother + Ffather) 1/3 chance of inheriting 1/2(2Fmother + Ffather) + 0.1 Female value reduced by 50% - 3.25
- The intent of these algorithms was to recognize that the behavior of children often follows the behavior of the parents. Whether this occurs via physical genetics ("nature") or social learning ("nurture") is irrelevant to the present simulation—it is the result rather than the cause which is simulated. Since, in real societies, there is a possibility that a child may turn out differently than the family in which it is raised, some statistical noise was included in the assignment of each parameter. Other procedures could, of course, be applied, including consideration of the effect of nutrition on fighting ability, the past history of the society, etc. Separate studies of the inheritance of normative character using a method similar to that employed here showed that the qualitative results of simulations, e.g. survival rates and general behavior, were usually insensitive to the details of parameter inheritance. This is not to say that simulation results are independent of the nature of the agents involved—random assignment of agent parameters will produce different results from those shown here.
- 3.26
- For female agents, the aggression and fighting ability parameters were reduced by 50%, consistent with lower levels of female aggression and fighting skills found in indigenous societies (Fry 2006). However, the parameter for these quantities was passed along at full strength (i.e. twice the operation value for females) in the calculation for the next generation.
- 3.27
- Agents with a high altruism parameter, i.e. those who were most likely to share and hence develop a positive reputation, were more likely to find a mate and hence pass along their altruism to the next generation. However, this does not imply a steady progression toward a society consisting entirely of altruistic individuals. While sharing conveyed long term benefits in terms of mate selection, theft provided a short term benefit in terms of food, an advantage that helped the agent survive long enough to procreate. Sometimes a population evolved to one consisting mainly of agents prone to steal.
- 3.28
- Each of the simulations was run for 40,000 time units: ten times the maximum lifetime of an agent or about 40 generations. The results of twenty runs were averaged in the tables are given below.
- 3.29
- Leaders in my simulations had two functions, both of which contributed to their control of the economic conditions of the population. They could order their agents to collect food for storage at their village and they could redistribute that food back to the population. Thus the simulation contained three means by which an individual could obtain food: immediate consumption at a food source, receipt of food through sharing or stealing, and food distribution by a leader.
- 3.30
- Recognizing the extraordinary complexity of leadership (charisma, organizational ability, rhetorical skill, physical strength, etc,) in even the smallest society, I described a leader in my simulations by adding only one additional normative parameter. The leader's drive parameter, Di, the value of which was between zero and one, determined what portion of a day an agent was compelled to obey its leader.
- 3.31
- A leader issued instructions to collect food at the beginning of each day to all residents present in its village. Each agent who received such an order would examine its memory to see what food source had the most food and set out in that direction. He or she would collect food and return it to the village, not eating any of it or sharing it with other agents. (Food could be stolen from agents who were carrying it back to their home village.) However, if the simulation clock exceeded 48 times Di then the agent was freed of any obligation once he returned to its home village. Since an agent moved one square per unit of time, examination of the environments indicates that an agent could, upon starting out from a village, reach a food source in as little as 10 time units. Thus if Di = 0.25, the agent would be under orders for 12 time units and would be obligated to make one round trip to a food source. For D i = 0.5, it would be required to make two trips and for Di = 0.75 three trips. Since food sources were limited by their replenishment rate, it was possible for an agent to set out for a food source, only to find it already depleted by other agents, forcing the agent to visit another food source before returning home.
- 3.32
- The drive parameter of an agent was inherited analogously to the altruism, aggression, and fighting parameters:
1/3 chance of inheriting 1/2(Dmother + Dfather) - 0.1
1/3 chance of inheriting 1/2( Dmother + Dfather)
1/3 chance of inheriting 1/2( Dmother + Dfather) + 0.1
- 3.33
- Once food was accumulated, a leader shared it with agents located in its village when (1 - 200/ hungersubject) < Aleader. Thus leaders with a large altruism parameter were likely to share with their subjects and leaders with a small altruism parameter only shared when the hunger of their subjects was extreme. To enable them to issue orders and distribute food, leaders were constrained to remain in their village.
- 3.34
- Agents began their lives with no knowledge of their environment, but quickly learned the locations of all food sources since they were constrained to move with their mothers during the first quarter of their lives. Information sharing focused on the communication of normative reputation, an element of social cohesion that was particularly important in small isolated societies.
- 3.35
- Agents had "lives of their own" when not following orders from their leader and used this time to collect food to feed their families. A key question for the simulations was whether the coordination of agent activity by the leader improved social performance as measured by the number of agents who lived to maximum age (a measure of the equity of food distribution) and the mutual obligation of the society (a measure of social solidarity).
- 3.36
- In the context of Complexity Leadership Theory, my leadership model consisted of a two-level bureaucracy comprised of a leader, his followers, the rules governing food collection and distribution. It was predominantly administrative in that the leader's instructions dominated the ability of the population to adapt to the time-dependent environment in which they found themselves. It was a materialist transactional scheme in that the leader issued instructions which his followers carried out, with benefits to the leader (food returned to the home village) and to the followers (food distributed back to the population). This contrasts to the leaderless case or, in anthropological terms, the egalitarian case, where individual households optimized their own food collection.
- 3.37
- In terms of Leader-Member Exchange theory, the leader's directions to the population and their return of food to the home shelter comprised a well-defined dyadic relationship between leader and followers. By varying the parameters of the leader, one can establish cause-effect relationships between his characteristics and various social outcomes. One can also explore the "reciprocal influence between leaders and followers" (Graen and Uhl-Bien 1995), an element of Leader-Member Exchange theory. Leaders issue orders, but also depend on the food returned to the village for their own survival. Within this simple model, can one find a set of leader characteristics that optimize social performance?
- 3.38
- The dominant role of food in my model is consistent with its central position in Polynesian society, as summarized by Kirch (1984): "The lives of all Polynesians, including the most sacred of chiefs, rotated around one central theme—the production, distribution, and consumption of food." Indeed, control over food is a fundamental source of power in small societies (Earle 1997). Its distribution, through feasts and other means, enhanced the prestige of the chief, here represented by adding the amount of food shared to the interaction matrix elements connecting the leader with his subjects. Note that the definition of food sources in my simulations does not restrict the results to gathering societies, since food sources could also represent cultivated areas.
- 3.39
- Several methods were used to choose a leader:
- Random selection: A random agent was chosen as a leader and given a random drive parameter.
- Fixed characteristics: An agent was chosen at random but was given predetermined values of Di, Gi, and Ai.
- Altruism: The agent with the highest value of Ai was chosen
- Merit: The agent with the highest value of Di + Ai was chosen
- Popularity: The agent with the highest reputation was chosen, that reputation being defined as the sum of interaction matrix elements linking the leader to the members of his village
- Prestige: The agent with the highest individual prestige was chosen
- Heredity: The oldest son of the previous leader was chosen. If there was no son, the oldest brother of the leader was chosen. If neither of these cases occurred then the new leader was chosen on the basis of merit.
- 3.40
- The method by which a leader was selected remained constant throughout each simulation and the same method was applied to both villages in the case of the two village environment. Only males above the age of 1000 time units were eligible to be a leader. (Females only rarely assumed political authority in Pacific societies.)
- 3.41
- The Hereditary scheme was common in Polynesia. The Popularity and Merit schemes encompassed some aspects of the Big Man system of Melanesia in which conspicuous generosity was used to secure leadership. Through persistent sharing, the aspiring leader created what Sahlins (1963) refers to as a "fund of power". The other schemes were investigated to ascertain the importance of specific leader characteristics on social performance.
- 3.42
- An important consideration in any social simulation is how the model might be verified (it does what it was intended to do) and validated (it describes nature). Previous papers (Younger 2003, 2004, 2005, 2005a, 2005b) describe the results of varying rules and parameters in codes similar to the one used here. The model for the communication of normative reputation used in MICROS (Younger 2004) compared favorably to a previous study to that of Castelfranchi et al (1998). The benefits of altruistic sharing in this type of code (Younger 2003) are in accord with the findings of Jaffe (2002). Comparison of the present results on leadership with simulations performed by Gigliotta et al (2007) will be given below.
- 3.43
- The construction of a social simulation is a balance between simplicity, which aids in the interpretation of results, and complexity, which provides a higher fidelity representation of the real world. Axelrod (1984) applied the simple prisoner's dilemma model to illuminate a variety of complex social phenomena. At the other end of the spectrum Axtell et al (1999) constructed a realistic simulation of the Anasazi of the Southwestern United States using detailed data on soil conditions and rainfall patterns. Doran (2000) has discussed the addition of complexity to multi-agent models based on his extensive research on the simulation of small societies. In this context, MICROS represents an intermediate level simulation, not intended to represent specific cultures but sufficiently complex to include some of the key factors affecting small isolated societies. Rather than a model of a specific culture, the simulations should be seen as an aid to the interpretation and understanding of phenomena in the real world, a means of illuminating ethnographic observation via a systematic exploration of the consequences of different sets of assumption.
Results of the Simulations
- 4.1
- Four simulations studies were conducted, three in a one village environment and one in a two village environment. In three of the four, leader characteristics were fixed. In the fourth, various means of transferring leadership upon the death of a leader are compared. In this section, I will present the results of the simulations. More detailed discussion and a comparison to Pacific cultures will be given in the next section.
Leadership with Fixed Drive and Altruism Parameters in a One Village Environment
- 4.2
- Leader drive regulated the collection of food and leader altruism its distribution. Table 1 gives the results of simulations of 50 agents inhabiting a one-village environment where the drive and altruism parameters of the leader were fixed. In this case, a leader was randomly chosen from the population and its Ai and Di were adjusted to the desired amount. Three values were modeled for each parameter: 0.25, 0.50, and 0.75.
Table 1: Results of simulations of 50 agents in a one-village environment vs. leader drive and altruism. Numbers in parentheses are standard deviations. Each entry is the average of twenty runs. Dleader/ Aleader Deaths Due to Old Age (%) Deaths
Due to
Hunger
(%)End Agents
Ai > 0.5 (%)Village Food Distributed
By
Leader
(%)Average
Agent
GiAverage
Agent
FiMutual Obligation Sharing
Rate
Per
AgentStealing
Rate
Per
AgentNo
leader27
(5.5)73
(5.5)83
(27)N / A 0.35
(0.079)0.37
(0.082)97
(45)0.017
(0.0029)0.0020
(0.00047)0.25 / 0.25 18
(2.5)82
(2.5)63
(30)56
(6.8)0.37
(0.079)0.43
(0.091)-120
(38)0.016
(0.0025)0.0042
(0.00045)0.25 / 0.50 16
(3.1)84
(3.1)86
(20)78
(6.5)0.49
(0.075)0.42
(0.082)-0.95
(95)0.030
(0.0041)0.0036
(0.00089)0.25 / 0.75 16
(2.4)84
(2.4)95
(8.4)88
(2.2)0.38
(0.077)0.41
(0.076)120
(79)0.052
(0.0056)0.0027
(0.00070)0.50 / 0.25 26
(2.9)74
(2.9)37
(28)73
(4.3)0.47
(0.094)0.46
(0.085)-380
(57)0.013
(0.0016)0.011
(0.0013)0.50 / 0.50 25 (3.1) 75
(3.1)80
(25)91
(2.7)0.45
(0.099)0.45
(0.075)-82
(130)0.036
(0.0042)0.0067
(0.0014)0.50 / 0.75 25
(3.0)75
(3.0)94
(7.1)96
(1.2)0.42
(0.088)0.44
(0.038)270
(200)0.059
(0.0054)0.0045
(0.0013)0.75 / 0.25 26
(3.8)74
(3.8)56
(31)87
(3.1)0.53
(0.072)0.47
(0.080)-390
(88)0.014
(0.0020)0.013
(0.0014)0.75 / 0.50 29
(3.0)71
(3.0)84
(23)95
(1.0)0.50
(0.10)0.48
(0.065)-6.1
(140)0.040
(0.0060)0.0075
(0.0015)0.75 / 0.75 27
(3.2)73
(3.2)89
(10)97
(0.40)0.50
(0.078)0.42
(0.075)420
(210)0.060
(0.0089)0.0044
(0.0012) - 4.3
- The survival probability for the total population was 100%, i.e. the population persisted until the end of the run in every case. Most agents in the simulation died of starvation rather than old age, a result of a relatively high birth rate and a fixed supply of food. Reducing the birth rate increased the age/hunger death ratio, but random fluctuations in birth rate, sex-balance, and other factors increased the probability of population collapse. One might regard death by hunger as inclusive of other causes of premature mortality, including illness, death in childbirth, etc.
- 4.4
- The fraction of agents who lived to maximum age was lowest when the leader's drive was set to 0.25, indicating that leaders interrupted food collection by individual households, but not sufficiently to provide food for redistribution. None of the cases of leadership significantly exceeded the age/hunger ratio achieved in a leaderless (egalitarian) society. Leader altruism had a smaller effect on the longevity of the agents since, even for small Aleader, the agents' hunger would eventually exceed the threshold for leader sharing.
Table 2: Correlation coefficients linking dependent social parameters to independent leader drive and altruism variables. Parameter Leader Drive Leader Altruism Deaths Due to Old Age (%) 0.92 -0.058 End Agents Ai > 0.5 -0.11 0.89 Mutual Obligation 0.013 0.91 Sharing Rate Per Agent 0.12 0.98 Stealing Rate Per Agent 0.58 -0.29 Agent Aggression 0.75 -0.18 Agent Fighting Strength 0.65 -0.53 Village Food Distributed by Leader 0.61 0.70 - 4.5
- Tables 2 and 3 provide a statistical analysis of the data. Immediately apparent from this analysis is that the percentage of highly altruistic agents at the end of the run, mutual obligation, and the sharing rate are all strongly correlated with one another and with leader altruism. The stealing rate and percentage of deaths due to old age are moderately correlated and both are correlated to leader drive.
Table 3: Matrix of correlation coefficients linking dependent social parameters. Deaths Due to
Old Age (%)End Agents
Ai > 0.5Mutual Obligation Sharing Rate Per Agent Stealing Rate Per Agent Agent
AggressionAgent
Fighting
StrengthFood
Distributed
by LeaderDeaths Due to Old Age (%)
1
-0.22
-0.047
0.082
0.40
0.60
0.74
0.53End Agents
Ai > 0.5
-0.22
1
0.86
0.87
-0.092
-0.20
-0.50
0.59Mutual Obligation
-0.047
0.86
1
0.94
-0.33
-0.20
-0.59
0.52Sharing Rate Per Agent
0.082
0.87
0.94
1
-0.047
-0.15
-0.43
0.73Stealing Rate Per Agent
0.40
-0.092
-0.33
-0.047
1
0.52
0.59
0.29Agent
Aggression
0.60
-0.20
-0.20
-0.15
0.52
1
0.53
0.42Agent Fighting Strength
0.74
-0.50
-0.59
-0.43
0.59
0.53
1
0.15Food
Distributed
by Leader
0.53
0.59
0.52
0.73
0.29
0.42
0.15
1 - 4.6
- Of particular interest is the number of highly altruistic agents ( Ai > 0.5) at the end of the simulation, illustrated in Figure 3. Recall that agents were randomly assigned Ai at the beginning of each run and that offspring were assigned the average values of their parents with a statistical scatter of 0.1. The net altruism of the population decreased slightly with increasing leader drive and increased with leader altruism. When a leader pushed the population very hard but did not redistribute the results of their labor, the agents were forced to fend for themselves and hunger frequently drove them to theft. Only agents with low altruism parameters survived to pass their altruism to the next generation. Conversely, when a leader was highly altruistic the population was fed in an equitable manner (all agents present at the village received a share of the leader's largesse) and theft was reduced. In this case the advantage was with agents who shared and who could attract a mate. By setting the altruism of the leader and observing the result, it can be viewed as a cause rather than just a correlate of population altruism.
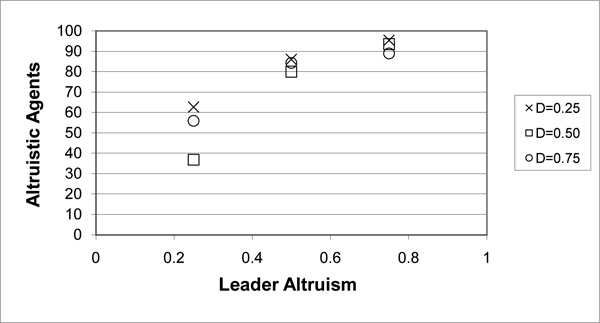
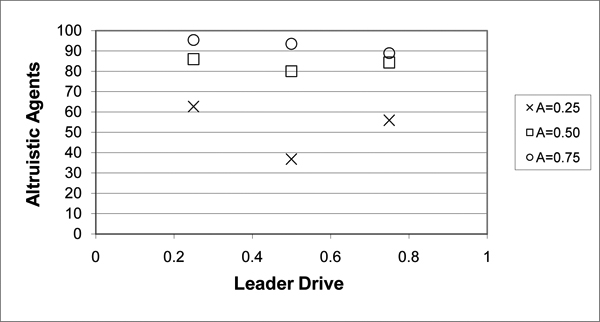
Figure 3. Percentage of altruistic agents, i.e. agents with Ai > 0.5, vs. leader altruism and leader drive for the case of one village. - 4.7
- Another manifestation of the same effect is seen in the rates of sharing and stealing, shown in Figure 4. The sharing rate increased linearly with leader altruism but was only weakly dependent on leader drive. The stealing rate—which was higher with a leader than without one—decreased with increasing leader altruism but increased with leader drive, especially at low values of leader altruism. Its correlate, fighting strength, was also higher when a leader was present.
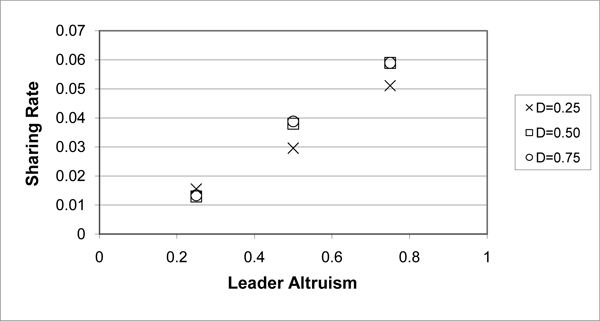
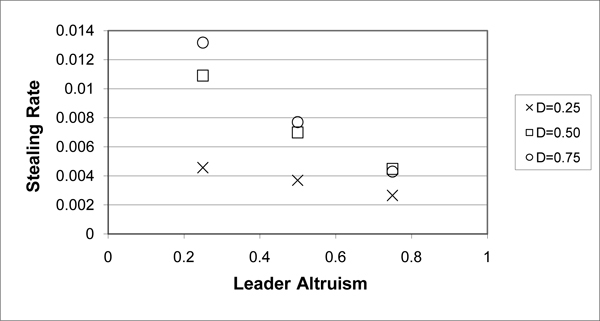
Figure 4. Sharing and stealing rates (events per agent per time unit) vs. leader altruism and drive for the case of one village. - 4.8
- As expected by the definition of the leader's altruism parameter, the fraction of food distributed by the leader increased with the leader's altruism. The balance of the food was consumed by the leader himself.
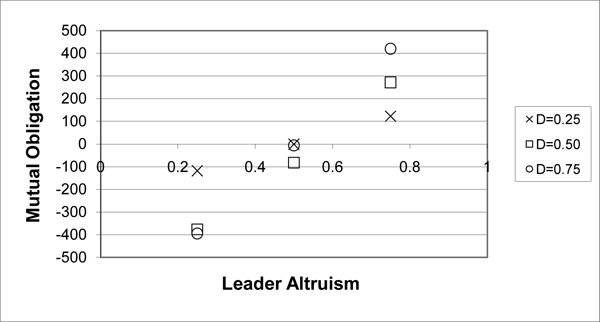
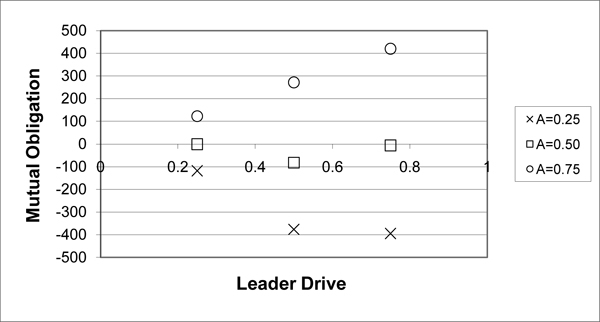
Figure 5. Mutual obligation vs. leader altruism and leader drive for the case of one village. - 4.9
- Since mutual obligation depended on the amounts shared stolen, and since altruistic agents shared more frequently than non-altruistic agents, I expected that mutual obligation would be proportional to the number of altruistic agents, and hence the leader's altruism. This is illustrated in Figure 5.
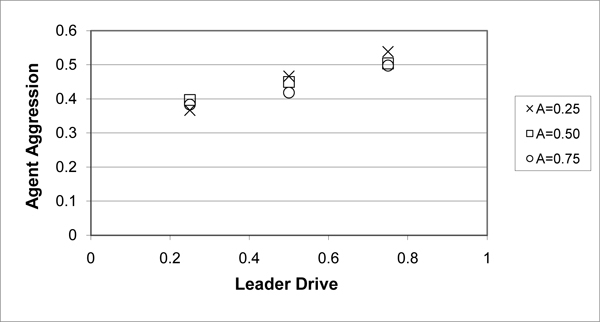
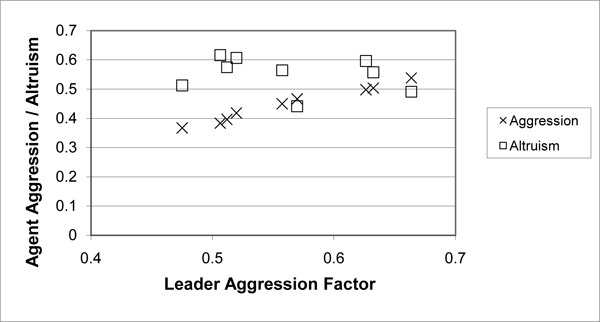
Figure 6. Agent aggression factor ( Gi) vs. leader drive and leader aggression for the case of one village. Also shown is agent altruism vs. leader aggression. - 4.10
- The behavior of mutual obligation vs. leader drive was more complex. For low leader altruism ( Aleader = 0.25) mutual obligation decreased with increasing leader drive, a reflection of the interference of the leader with the agent food collection. Only at high leader altruism, when the leader distributed food promptly among the population, did mutual obligation increase with leader drive. Agents then had food to share among themselves. The highest value of mutual obligation occurred when Aleader = Dleader = 0.75.
- 4.11
- The average aggression factor of the population, shown in Figure 6, increased with leader drive. Since male agents had an average aggression factor of Gi = 0.5 and females had an average of 0.25, an equal mix of sexes would have resulted in an average of Gi = 0.375. Only in the case of no leader and Dleader = 0.25 were these averages observed—as leader drive increased there was a preference for more aggressive agents with higher fighting ability. The harder the leader drove his population, the more aggressive that population became. Figure 6 also plots agent altruism and aggression vs. the aggression of the leader, which was not fixed in this simulation but allowed to vary according to the inheritance rules given in the previous section. While agent altruism was not strongly dependent on Gleader, agent aggression increased with leader aggression. Aggressive leaders stimulated aggressive populations or, conversely, aggressive populations gave rise to aggressive leaders. Because I did not fix Gleader, I can only claim a correlation, but not a casual relationship.
Transmission of Leadership in a One-Village Environment
- 4.12
- Table 4 gives the results for various models of leadership transmission for the case of 50 agents inhabiting a one-village environment. By definition, the Altruism scheme selected the leader with the highest altruism. The Merit scheme, where the male agent with the highest value of Di + Ai was chosen as leader, produced leaders with the highest drive. All of the schemes produced leaders with average drive between 0.47 and 0.77 and altruism between 0.46 and 0.74. It is noteworthy that the Prestige, Popularity, and Heredity schemes produced leaders of quite average characteristics, but the number of leaders who lived during the run was larger for these schemes than for the Random, Altruism, or Merit schemes, indicating that individual leaders did not live as long and had to be replaced. They were less effective at getting their agents to bring food back to the village and they starved to death.
Table 4: Results of simulations of 50 agents in a one-village environment vs. model for leader succession. Numbers in parentheses are standard deviations. Scenario Deaths Due to Old Age (%) Deaths
Due to
Hunger
(%)Ending Agents
Ai > 0.5 (%)Average
Agent
GiAverage
Agent
FiVillage Food Distributed by Leader (%) Mutual Oblig Leader
PopularityNumber
Of
LeadersDleader Aleader No Leader 27
(5.5)73
(5.5)83
(27)0.35
(0.080)0.37
(0.082)N / A 97
(45)N / A N / A N / A N / A Random 25
(3.7)75
(3.7)83
(26)0.44
(0.068)0.46
(0.081)93
(1.7)56
(230)1400
(470)33
(6.8)0.47
(0.085)0.56
(0.088)Altruism 26
(3.8)74
(3.8)79
(25)0.44
(0.088)0.45
(0.072)96
(1.5)340
(255)1600
(700)27
(10)0.53
(0.12)0.74
(0.076)Merit 29
(4.2)71
(4.2)94
(5.9)0.48
(0.057)0.46
(0.088)96
(1.4)320
(260)2400
(420)20
(2.7)0.77
(0.093)0.59
(0.063)Popularity 25
(3.2)75
(3.2)86
(16)0.46
(0.082)0.42
(0.080)91
(5.0)45
(242)2700
(610)45
(7.7)0.55
(0.13)0.48
(0.052)Prestige 25
(4.1)75
(4.1)78
(22)0.44
(0.099)0.45
(0.079)89
(3.7)-100
(223)2800
(900)50
(8.5)0.50
(0.11)0.46
(0.050)Heredity 26
(4.1)74
(4.1)74
(32)0.41
(0.096)0.43
(0.057)93
(3.1)83
(290)2800
(780)43
(4.5)0.52
(0.079)0.48
(0.061) - 4.13
- The method by which the leader was selected had little effect on the gross demographics of the population, i.e. the percentage of agents who starved vs. those who lived to maximum age. The Merit scheme yielded the most altruistic population, as measured by the number of agents with Ai > 0.5. Leader altruism alone was insufficient to optimize altruism in the population. It was not simply the most generous leader who maximized the generosity of the population but the one who insisted on both food collection (high Di) and distribution (high Ai). This was the best assurance that agents would have food to share and, given the rule of marriage that preferred generous agents, it led to increased altruism in the population.
- 4.14
- All of the leader selection schemes resulted in a more aggressive population than a society without a leader. There was little variation between the level of aggression and fighting ability between the different transmission schemes. It is interesting that the popularity of the leader was much lower in the Random and Altruism schemes than in the Merit, Popularity, Prestige, and Heredity schemes.
- 4.15
- Mutual obligation, shown in Figure 7, was highest for the Merit and Altruism schemes, consistent with the results of the fixed parameter studies given in Table 1 where mutual obligation was shown to be a strong function of leader altruism. Hereditary leadership yielded only slightly better mutual obligation than the Random scheme, but well below the Merit and Altruism schemes. Note that the scatter in mutual obligation was much greater when a leader—of any kind—was present than it was when there was no leader.
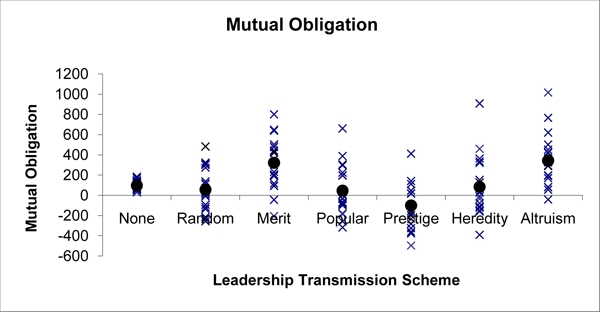
Figure 7. Mutual Obligation vs. scheme for the transmission of leadership. The results of individual runs are given by crosses. The average for each scheme is given by a circle. - 4.16
- Overall, the Merit scheme proved best of the leadership choices. It had the highest fraction of agents living to old age, a high mutual obligation, high average altruism, and the lowest turnover of leaders.
Leadership With Fixed Drive and Altruism Parameters in a Two Village Environment
- 5.1
- I now turn to a study of the effects of leadership drive and altruism in a two-village environment. Table 6 describes the values of leader drive and altruism for each of the villages. The most interesting case was when the two villages had leaders with opposite characteristics, one having weak drive and strong altruism and the other strong drive and weak altruism. For comparison purposes, I include the case of a two-village environment with no leader in either village. The results of the simulations are given in Table 7.
- 5.2
- For the case where both leaders had the same characteristics, the results for each village were nearly identical and were similar to those of the corresponding single-village case given in Table 1. In the case where the villages had leaders with different characteristics, the results were usually composites of the one village cases, implying some interaction between the populations. In no case did one village dominate the other—both villages had populations that persisted until the end of the run. This is significant in that the villages competed for limited food resources, especially at the contested food source in the center of the two-village environment.
Table 6: Characteristics of leaders in two-village environment for the simulations given in Table 7. Case Village 1 Village 2 No leadership No leader No leader Low Drive
High AltruismDrive = 0.25
Altruism = 0.75Drive = 0.25
Altruism = 0.75High Drive
Low AltruismDrive = 0.75
Altruism = 0.25Drive = 0.75
Altruism = 0.25Villages leaders with
opposite characterDrive = 0.25
Altruism = 0.75Drive = 0.75
Altruism = 0.25Table 7: Results of simulations of the two-village environment. Parameter No leader Both .25 /.75 Both .75/.25 One each Deaths Age (%) 29
(3.0)16
(2.4)27
(2.4)22
(1.6)Deaths Hunger (%) 71
(3.0)84
(2.4)73
(2.4)78
(1.6)V1: Average Population 53
(1.3)52
(2.5)48
(1.2)53
(2.9)V2: Average Population 54
(1.2)52
(2.1)47
(0.83)44
(2.5)V1: Ai > 0.5 (%) 83
(15)88
(4.3)56
(13)73
(16)V2: Ai > 0.5 (%) 84
(14)89
(4.4)56
(13)65
(16)V1: Distrib (%) N / A 77
(5.7)86
(1.5)59
(6.2)V2: Distrib (%) N / A 78
(5.7)86
(1.5)92
(2.0)V1: Mutual Obligation 80
(15)110
(51)-210
(20)-46
(28)V2: Mutual Obligation 80
(14)52
(9.4)-220
(21)-62
(98)
Discussion
- 6.1
- Four principal conclusions can be drawn from the simulations:
- Leadership did not significantly improve the percentage of agents who lived to old age but some leader characteristics improved social cohesion.
- Altruistic leaders produced altruistic populations; leaders with high drive parameters produced more aggressive populations.
- Social performance was insensitive to most methods of choosing a leader.
- Individual leadership styles did not result in a net advantage when two groups competed for the same food resources.
Leadership Did Not Significantly Improve the Percentage of Agents Who Lived to Old Age but Some Leader Characteristics Improved Social Cohesion
- 6.2
- The simple model of leadership used in my simulations focused on collecting food and storing it for redistribution to the population. I found that some of the leadership styles (especially low leader drive) were not as effective as an egalitarian society—one in which individuals acted on their own—in enabling agents to live to their maximum allowed age. None of the leadership styles substantially improved the percentage of agents who lived to old age beyond what occurred in the leaderless case. An inequality, a type of social stratification, was introduced into the society with the leader and his family having preferential access to food stored at the home village.
- 6.3
- In fact, one would not expect leadership to substantially increase the percentage of agents who survived to old age. This percentage was determined by the combination of birth rate and the carrying capacity of the environment, in this case the food source replenishment rate. Households could optimize their collection of food by seeking it when they needed it, and a leader could satisfy their need by collection and redistribution, but neither could exceed the ability of the environment to support a population constantly undergoing additions via births.
- 6.4
- Several studies (Cordy 1986, Goldman 1955, 1970, Sahlins 1958, 1963) have shown that the complexity of leadership and social stratification increased with population size. Semi-egalitarian societies were common when the population was below about 1,000. Small Polynesian islands such as Nukuoro, Sikaiana, Kapingamarangi, and Pukapuka (Goldman 1955 , 1970; Sahlins 1958;Younger 2008) had very weak leaders who did not interfere in household economies. There was little value added to a leader directing activities that could be performed equally well by individuals better attuned to their own needs. Why have chiefs at all? On the smallest islands, chiefs served to clarify and communicate consensus decisions of the governing council or, in some cases, the entire population. They had sacred functions in representing the population to the deities, but their economic role was minimal. Sahlins (1958) and Earle (1997) argue that, on larger islands, a principal reason for a leader's involvement in an island's economy was to generate the surplus required to maintain and expand his personal prestige and power.
- 6.5
- But, if leaders added little to the economic performance of small societies, why was the Big Man scheme so prevalent in Melanesia, where the typical size of a group was often only 70-300 persons? Here a leader was respected as a model citizen and, as Meggitt (1967) observed of the Mae Enga of Papua New Guinea, some populations demanded a leader. In the context of Leader-Member Exchange theory (Graen and Uhl-Bien 1995), the answer may be in the relationship between leaders and followers in the two cultures. In Polynesia, the population was under the authority of a chief who usually held his office by right of inheritance. Someone had to occupy the office to coordinate communal activities and heredity provided a means to transfer leadership with a minimum of conflict. But, given the average characteristics of individuals born into their positions, constraints were placed upon their actions, including constraints against undue interference into the affairs of individual households.
- 6.6
- In Melanesia, a Big Man sought leadership (or, to be more precise, followers), by demonstrating an advantage to the population. As an individual with high drive, he collected food from his own gardens and received it as gifts from his in-laws. He then distributed it to the population, an illustration of high altruism. High-drive leaders fundamentally changed the dynamic of my simulated society and, presumably, Big Man societies as well. Without leadership, agents found food individually and, if their own need was not extreme, they shared it with others. Gift-generated mutual obligation was horizontal, i.e. between individual members of the society. In contrast, agents in a society with a leader with a high drive parameter collected food and returned it to the village where it was distributed by the leader. While the agents received approximately the same amount of food in either case (they had to have had in order to survive), they did so partly through the largess of the leader. Strong bonds of obligation extended vertically from individuals to their leader in addition to horizontally between one another. This is analogous to how a Big Man maintained power—by conspicuous generosity. As Service (1975: 95) noted, "a well-managed redistribution system, by its very nature, contributes to solidarity." Big Men created social cohesion, just as leaders in the simulation enhanced mutual obligation beyond what would have been the case in an egalitarian society. Again within the context of Leader-Member Exchange theory, the relationship between leader and follower was more than materialist transactional, it had an important normative component in binding the group together.
- 6.7
- Gigliotta et al (2007) used multi-agent simulation to examine the role of a leader in directing the exploration of a group in a finite environment. The criterion for success was the speed with which all agents reached a predefined goal. They found that without communication between agents a leader provided a net benefit in that all of the agents explored the environment together and reached the goal within a short interval. Large groups were more efficient than small ones. Conversely, when communication was present, large groups without a leader performed better than small groups. In my simulations, food collection was the operative factor rather than exploration and sharing of food was analogous to the sharing of information in the model of Gigliotta et al (2007). Because of the small environment, communication of information on food sources was not necessary—agents could sense that themselves. To the extent to which the models can be compared, both predict that groups with knowledge of their environment are more efficient without a leader than with one.
Altruistic Leaders Produced Altruistic Populations; Leaders with High Drive Parameters Produced More Aggressive Populations
- 6.8
- One of the unexpected results of the simulations was that leaders had a causal role in the normative makeup of the population. In particular, higher leader altruism led to higher altruism in the population. Leaders who satisfied the hunger of their followers gave them less cause to steal and more opportunities to share, enhancing their reputation and hence their ability to attract a mate and pass along their normative character. In essence, the leader created the context in which the agents acted.
- 6.9
- Most Pacific societies expected a chief to be generous. A Polynesian chief's inheritance of position gave him a right to power, but tyrants were sometimes deposed and killed. A chief had to maintain the respect of the people and, in his sacred role as intercessor with the gods, the appearance of righteous action. A Big Man's position in society was more tenuous. He had no right to power and had to constantly demonstrate his value lest his followers desert him in favor of a better offer. He gained respect by his actions, which set a standard for others. In both ascribed and achieved leadership cultures, leaders were expected to model desirable behavior and, in this sense, they influenced the normative character of their followers.
- 6.10
- In the simulations, the average aggression of the population increased with leader drive and was correlated with leader aggression. Leaders who confiscated food from agents under their direction and who forced agents to spend most of their time collecting food for redistribution stimulated the agents to steal in order to meet their food needs. Those agents with high aggression parameters, i.e. those who would be more successful in theft, had an advantage in survival and passed along this normative characteristic to the next generation. Still, there was a net benefit to leaders with high drive compared to those with low drive. While the stealing rate was higher, so too was the sharing rate, leading to higher mutual obligation.
- 6.11
- Bravery and, to some degree aggression, was expected of chiefs and Big Men. Especially on large islands and in groups of islands inhabited by distinct polities, conflict was frequent (Younger 2008, 2009). On Niue in Polynesia, warriors engaged in open competition for power (Goldman, 1970). On Chuuk in Micronesia, chiefs led small groups averaging 100 persons in near-constant fighting. Personal aggression, including theft, was considered a demonstration of strength and hence worthy of respect (Marshall 1979). In Melanesia, the role of Big Man was achieved through competition, encouraging highly motivated (i.e. high drive) individuals to demonstrate their ability. Just as people emulated the generosity of a leader, so too might they have emulated their more aggressive attributes. In a cross cultural study of warfare, Ember and Ember (1994) proposed a casual connection between war and the socialization for violence which, given the role of leaders in war, might be seen as a connection between the aggression of a leader and that of the population. More research is needed to confirm the relation between aggression in a leader and in the general population, but the suggestion of Ember and Ember (1994) is compatible with the results of the simulations.
Social performance was insensitive to most methods of choosing a leader
- 6.12
- Most of the methods used to transfer leadership from one generation to another produced average results in terms of the percentage of agents who reached maximum age, the percentage of highly altruistic agents in the population, and demographics. The Merit scheme was the best one in terms of altruism, mutual obligation, and the rate at which leaders needed to be replaced.
- 6.13
- The simulations provide some insight into the different character of leadership in the Pacific. As discussed above, the means by which a leader was identified—ascription or achievement—was linked to his role in society. Polynesian chiefs on small islands served more as coordinators of consensus decisions than as top-down administrators. Their inheritance of title meant that they were often of average ability and, growing up in close proximity to the rest of the population, there was little social distance to separate them into a separate class. This is analogous to the simulation results where heredity produced an average leader who did not significantly enhance the performance of the society. Big Man leadership was closest to the Merit scheme that selected the individual with the highest combination of drive (having food to share) and altruism (distributing it to the population). Big Men demonstrated their ability as a means of attracting followers and in so doing enhanced the solidarity of their group. Note that it was the Merit scheme, rather than the Popularity or Prestige schemes, that produced the best results in terms of popular altruism and mutual obligation. It was not enough for a leader to have a good reputation—there needed to be society-wide results from his actions.
- 6.14
- My results may appear to discount the importance of extraordinary individuals, i.e. the "great man" theory of social dynamics, but a closer inspection of individual runs indicated that extraordinary individuals could indeed have a significant effect over the short term. For example, I found several cases where a leader with very high drive and very low altruism parameters worked a population to near extinction. The reverse was also true—altruistic leaders with moderate to high drive enabled a sustainable population. However, when averaged over many runs and many generations, the effect of special individuals was absorbed into a greater average.
Individual Leadership Styles Did Not Result in a Net Advantage When Two Groups Competed for the Same Food Resources
- 6.15
- Just as a leader did not have a significant impact on the economic performance of a single village, he did not provide a competitive advantage when two villages competed over a limited supply of food. A high drive parameter, which resulted in agents scouring the landscape for food to return to their village, did not upset the overall population balance. This is consistent with the survival of multiple polities even on islands as small as Pukapuka, where three villages of quite different sizes survived over many generations. One village did not dominate the others to their ultimate disappearance. One might expect this situation to change when violence is added to the simulation. This is indeed the case and studies of violence and warfare using an expanded version of the model employed here will be presented in a future publication.
Conclusion
- 7.1
- A closer interaction between computer simulation and observational anthropology may improve our understanding of indigenous cultures. With its rigorous control of parameters, computer simulation can illuminate certain features of ethnographic studies that may not be immediately apparent from individual cases. In the present paper, the role of high-drive leaders in enhancing social cohesion provides insight into the differences between chiefs on small Polynesian islands and Big Men in Melanesia.
- 7.2
- The role of leadership in my simulations was limited to directing the collection and distribution of food in small groups. It would be interesting to expand this study to much larger ensembles of agents to determine if economies of scale reduce or amplify some of the features of leadership observed here. Larger societies that practiced intensive agriculture required a division of labor and often supported a distinct class of craftspeople. Value was provided in the central management of these functions. The effect of more complex agent decision processes, such as need-based distribution algorithms and intelligent food search routines, would also be fruitful areas of research. Finally, a more detailed study of leadership in larger societies should include considerations of leader prestige and power and the use of violence and warfare to enhance them. Some work along the lines of this last point has been done within the MICROS model and will be reported separately.
Appendix: Pseudocode for the MICROS Social Simulation Code
- 8.1
- The code used for the simulations described above consisted of approximately 4900 lines of code written in Visual Basic. A 100 agent simulation executed on a 3 GHz personal computer took approximately 2-3 hours, depending on the options included. The following pseudocode is intended to give the reader an understanding of the sequence of actions performed in the code.
Main Agent Decision Routine:
FOR each agent: IF agent is female, has no mate, and has reached reproductive age THEN SELECT male with whom female has highest interaction matrix element PLACE mated female at same location as her mate SENSE the environment and store the location of food sources and villages COMMUNICATE normative reputation with collocated agents IF the agent is under orders from its leader to collect food AND clock < (Leader drive * length of day THEN IF not already carrying food THEN CALL food routine EXIT main agent decision routine END IF IF carrying food then CALL movement routine to return to village EXIT main agent decision routine END IF END IF IF hunger > 0.5 maximum hunger AND clock < 0.75 * length of day THEN CALL food routine EXIT main agent decision routine END IF IF clock > 0.75 * length of day THEN CALL movement routine to return to village EXIT main agent decision routine END IF CALL movement routine to explore landscape END agent decision routine
Food Routine:
IF the agent is carrying food THEN eat all of that food IF the agent is at a food source THEN Eat food to reduce hunger to zero IF food remains at the food source, collect up to maximum carry capacity EXIT food routine ELSE SEARCH memory of agent to find nearest food source with food at time of last observation IF agent remembers a food source with food THEN MOVE one square in the direction of that food source ELSE CALL movement routine to move one square in a random direction in search of food END IF END IF END food routine
Movement routine:
SENSE the environment by storing the location of all agents and food sources within sensory range STORE the locations of all food sources, along with the amount of food and the time of observation, in the agent's memory IF the flight option is enabled AND there is an agent within sensory range for whom the active agent has a negative interaction matrix element THEN MOVE one square away from that agent EXIT the movement routine END IF IF the agent is searching for food AND the agent is at a food source THEN Eat food to reduce hunger to zero IF food remains at the food source THEN COLLECT up to maximum carry capacity EXIT the movement routine END IF ELSE IF agent has sensed a food source that has food THEN MOVE one square in the direction of that food source ELSE MOVE one square in a random direction in search of a food source that is in supply END IF END IF
Communication routine:
Sharing
IF there are other agents at the same location AND the active agent is carrying food AND the ratio (agent hunger / maximum hunger) < the agent's altruism parameter THEN COUNT the number of agents at that location who are not carrying food CALCULATE a share as the amount of food carried by the active agent divided by the number of counted agents GIVE a full share to agents of the same group as the sharer and one half share to agents of a different group ADD the amount shared to the interaction matrix element imx (receiver, sharer) of each agent END IF
Stealing
IF there is another agent at the same location who is carrying food AND the active agent is not carrying food AND [(agent hunger / maximum hunger before death) > the agent's altruism parameter] AND [(agent hunger / maximum hunger) > ( 1 - agent's aggression parameter)] THEN IF active agent has larger aggression parameter AND larger fighting ability parameter THEN TAKE all of the food carried by the other agent REDUCE the interaction matrix element imx(victim, thief) by the amount of food stolen EXIT communication routine END IF
Share normative reputation of other agents
FOR all other agents j at the same location at the active agent FOR all agents k IF either the active agent or agent j has a non-zero interaction matrix element imx(agent, k) THEN imx(active, k) = ½ (imx(active, k) + imx(j, k)) imx(other, k) = ½ (imx(active, k) + imx(j, k)) END IF
Agent reproduction
IF the active agent is collocated with its mate AND 0.25 * (agent lifetime) < male age < 0.75 * (agent lifetime) AND 0.25 * (agent lifetime) < female age < 0.75 * (agent lifetime) AND (RANDOM NUMBER) < 0.0025 THEN SET parameters of a new agent Location is same as parents Group is same as parents Equal probability of male or female Random aggression parameter Random fighting ability parameter Altruism parameter: 1/3 chance of mother's altruism parameter 1/3 chance of mother's altruism parameter + 0.1 1/3 chance of mother's altruism parameter - 0.1 END IF
Leader Selection routine:
IF leader selection is RANDOM THEN SELECT an agent at random from the designated home village and make him leader IF the drive and/or altruism parameters are fixed THEN set the leader's drive and altruism to the desired values IF leader selection is by HEREDITY THEN SELECT the eldest son of the current leader as the next leader IF the leader has no son THEN chose the eldest brother of the leader as the next leader AND assign the eldest brother's son as the subsequent leader IF the leader has no son and not brothers THEN use the MERIT scheme IF leader selection is by MERIT THEN SELECT the agent with the highest value of altruism + drive from the designated home village and make him the new leader IF leader selection is by POPULARITY THEN SELECT the agent with the highest value of the sum of the interaction matrix elements linking him to all other agents of the designated home village IF leader selection is by PRESTIGE THEN SELECT the agent with the highest value of prestige from the designated home village
Leader Decision routine:
IF the leader's drive parameter * length of day > clock THEN all agents at the home village are ordered to collect food ELSE all agents at the home village are free of any leader order ENDIF IF the leader's hunger factor is > 0.5*maximum hunger THEN allow the leader to consume food stored at the home village
References
-
AXELROD, R (1984) The Evolution of Cooperation. New York: Basic Books.
AXTELL, R L, Epstein, J M, Dean, J S, Gummerman, G J, Swedlund, A C, Harburger, J, Chakravarty, S, Hammond, R, Parker, J, and Parker, M (1999) Population Growth and Collapse in a Multi-agent Model of the Keyenta Anasazi in Long House Valley, Proceedings of the National Academy of Sciences, Colloquium 99(3): 7275-7279.
BOEHM, C (1993) Egalitarian society and reverse dominance hierarchy, Current Anthropology, 34: 227-254. [doi:10.1086/204166]
BOEHM, C (1999) Hierarchy in the Forest: The Evolution of Egalitarian Behavior. Cambridge: Harvard University Press.
CARNEIRO, R L (1970) A theory of the origin of the state. Science 169: 733-738. [doi:10.1126/science.169.3947.733]
CARNEIRO, R L (1981) The chiefdom as precursor to the state. In Jones, G. and Krautz, R. (Eds.) The Transition to Statehood in the New World. Cambridge: Cambridge University Press. Pp. 37-79.
CASTELFRANCHI, C, Conte, R and Paolucci, M (1998) Normative reputation and the costs of compliance. Journal of Artificial Societies and Social Simulation 1(3) 3 https://www.jasss.org/1/3/3.html.
CORDY, R (1986) Relationship between the extent of social stratification and population in Micronesian polities at European contact. American Anthropologist 88(1): 136-142. [doi:10.1525/aa.1986.88.1.02a00100]
DORAN, J (2000) Trajectories to complexity in artificial societies: Rationality, belief, and emotions. In Kohler, T A and Gummerman, G J (Eds.) Dynamics in Human and Primate Societies: Agent-Based Modeling of Social and Spatial Processes. New York: Oxford University Press.
EARLE, T (1997) How Chiefs Come to Power: The Political Economy in Prehistory. Stanford: Stanford University Press.
EMBER, C R and Ember, M (1994) War, socialization, and interpersonal violence. J. Conflict Resolution 38: 620-646. [doi:10.1177/0022002794038004002]
FRIED, M (1967) The Evolution of Political Society. New York: Random House.
FRY, D P (2006) The Human Potential for Peace: An Anthropological Challenge to Assumptions about War and Violence. New York: Oxford University Press.
GIGLIOTTA, O, Miglino, O and Parisi, D (2007) Groups of agents with a leader. Journal of Artificial Societies and Social Simulation 10(4)1 https://www.jasss.org/10/4/1.html
GOLDMAN, I (1955) Status rivalry and cultural evolution in Polynesia, American Anthropologist 57: 680-697. [doi:10.1525/aa.1955.57.4.02a00030]
GOLDMAN, I (1970) Ancient Polynesian Society. Chicago: University of Chicago University.
GRAEN, G B and Uhl-Bien, M. (1995) Relationship-based approach to leadership: Development of leader-member exchange (LMX) theory of leadership over 25 years: Applying a multi-level multi-domain perspective. Leadership Quarterly 6: 219-247. [doi:10.1016/1048-9843(95)90036-5]
HAZY, J K (2007) Computer models of leadership: Foundations for a new discipline or meaningless diversion? Leadership Quarterly 18: 391-410. [doi:10.1016/j.leaqua.2007.04.007]
JAFFE, K 2002) An economic analysis of altruism: Who benefits from altruistic acts? Journal of Artificial Societies and Social Simulation 5 (3) 3 https://www.jasss.org/5/3/3.html.
KELLY, R L (1995) Diversity in Hunter-Gatherer Lifeways. Washington: Smithsonian Press.
KIRCH, P V (1984) The Evolution of Polynesian Chiefdoms. Cambridge: Cambridge University Press.
MARSHALL, M. (1979) Weekend Warriors: Alcohol in a Micronesian Culture. Palo Alto: Mayfield.
MEGGITT, M J (1967) The pattern of leadership among the Mae-Enga of New Guinea. Anthropological Forum 2: 20-35. [doi:10.1080/00664677.1967.9967215]
MCARTHUR, A M (2000) The Curbing of Anarchy in Kunimaipa Society. Sydney: University of Sydney Press.
NEUMANN, M (2008) Homo socionicus: A case study of simulation models of norms. Journal of Artificial Societies and Social Simulation 11 (4) 6 https://www.jasss.org/11/4/6.html
OLIVER, D L (1955) A Solomon Island Society: Kinship and Leadership Among the Siuai of Bougainville. Cambridge: Harvard University Press. [doi:10.4159/harvard.9780674183117]
OLIVER, D L (1974) Ancient Tahitian Society. Honolulu: University of Hawai'i Press.
PENNINGTON, R (2001) Hunter-gatherer demography, in Panter-Brick, C, Layton R H and Rowley-Conway, P (Eds.) Hunter Gatherers: An Interdisciplinary Perspective. Cambridge: Cambridge University Press.
PETERSON, G (2000) Indigenous island empires: Yap and Tonga reconsidered. J. Pacific History 35: 5-20. [doi:10.1080/00223340050052275]
POWELL, H A (1960) Competitive leadership in Trobriand political organization. J. Royal Anthropological Inst. Of Great Britain and Ireland 90: 118-145. [doi:10.2307/2844221]
SAHLINS, M D (1958) Social Stratification in Polynesia. Seattle: University of Washington Press.
SAHLINS, M D (1963) Poor man, Rich man, Big-man, Chief: Political types in Melanesia and Polynesia, Comparative Studies in Society and History 5: 285-303. [doi:10.1017/S0010417500001729]
SERVICE, E (1975) Origins of the State and Civilization: The Process of Cultural Evolution. New York: Norton.
UHL-BIEN, M and Marion, R (2009) Complexity leadership in bureaucratic forms of organizing: A meso model. Leadership Quarterly 20: 631-650. [doi:10.1016/j.leaqua.2009.04.007]
UHL-BIEN, M, Marion, R and McKelvey B (2007) Complexity leadership theory: Shifting leadership from the industrial age to the knowledge era. Leadership Quarterly 18: 298-318. [doi:10.1016/j.leaqua.2007.04.002]
WATSON-GEGEO, K I and Feinberg R (1996) Sanctity and power on Anuta: Polynesian chieftainship revised. In Feinberg R and Watson-Gegeo, K I (Eds.) Leadership and Change in the Western Pacific: Essays Presented to Sir Raymond Firth on the Occasional of His Ninetieth Birthday. London: Athlone.
WOBST, M (1974) Boundary conditions for Paleolithic social systems: A simulation approach. American Antiquity 29: 146-178. [doi:10.2307/279579]
YOUNGER, S M (2003) Discrete Agent Simulation of the effect of simple social structures on the benefits of resource sharing. Journal of Artificial Societies and Social Simulation 6(3)1 https://www.jasss.org/6/3/1.html.
YOUNGER, S M (2004) Reciprocity, normative reputation, and the development of mutual obligation in gift-giving societies. Journal of Artificial Societies and Social Simulation 7(1)5 https://www.jasss.org/7/1/5.html.
YOUNGER, S M (2005) Reciprocity, Sanctions, and the Development of Mutual Obligation in Egalitarian Societies. Journal of Artificial Societies and Social Simulation 8(2)9 https://www.jasss.org/8/2/9.html.
YOUNGER, S M (2005a) Behavioral Norms and the Evolution of Societies, Proceedings of the AISB Conference 2005.
YOUNGER, S M (2005b) Violence and revenge in egalitarian societies. Journal of Artificial Societies and Social Simulation 8(4)11 https://www.jasss.org/8/4/11.html.
YOUNGER, S M (2008) Conditions and mechanisms for peace in pre-contact Polynesia. Current Anthropology 22: 927-934. [doi:10.1086/591276]
YOUNGER, S M (2009) Violence and warfare in the pre-contact Caroline Islands. J. Polynesian Society 118: 135-164.