
Francesc S. Beltran, Laura Salas and Vicenç Quera (2006)
Spatial Behavior in Groups: an Agent-Based Approach
Journal of Artificial Societies and Social Simulation
vol. 9, no. 3
<https://www.jasss.org/9/3/5.html>
For information about citing this article, click here
Received: 14-Nov-2005 Accepted: 22-Apr-2006 Published: 30-Jun-2006

 Abstract
Abstract
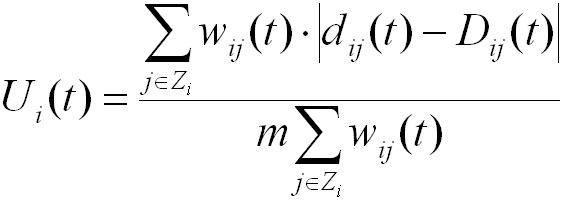 |
(1) |
where Zi is the subset of agents perceived at time t by agent i and from which agent i keeps non-neutral ideal distances; m is the maximum possible real distance, given the dimensions of the room, and is used to rank dissatisfaction between 0 and 1; wij(t) weighs the discrepancy between the real and ideal distance; dij(t) is the current real distance between agents i and j at time t; and Dij(t) is the ideal distance agent i wants to keep from agent j at time t (for details, see Quera, Beltran, Solanas, Salafranca, & Herrando 2000).
| Pij(t+1) = Pij(t) + r·k·T2/tp | (2) |
| Sij(t+1) = Sij(t) + r·k·T2/tm | (3) |
| Pij(t+1) = Pij(t) + r·k·T2/ts Sij(t+1) = Sij(t) + r·k·T2/ts | (4) |
|
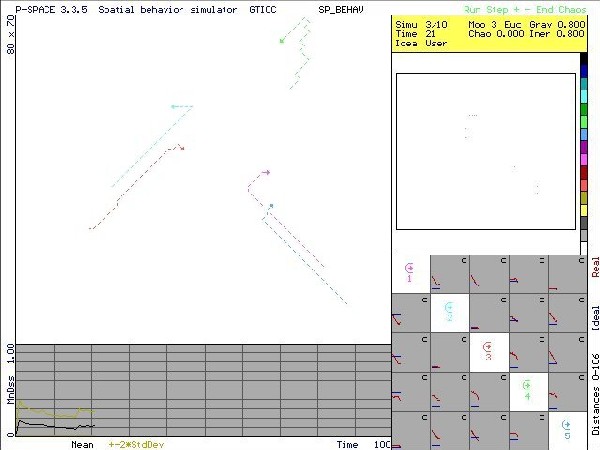
| Figure 1. Interface screen of P-Space. A room with five agents is shown in the upper left section. The lower left plot shows the agents' dissatisfactions as a function of time. Ideal and real distances between agents as a function of time are shown in the lower right 5 × 5 grid. The upper right section of the screen displays the room to scale, where frequency of occupation is represented using color codes in a real screen. Also, different colors are used for identifying agents and their trajectories. |
|
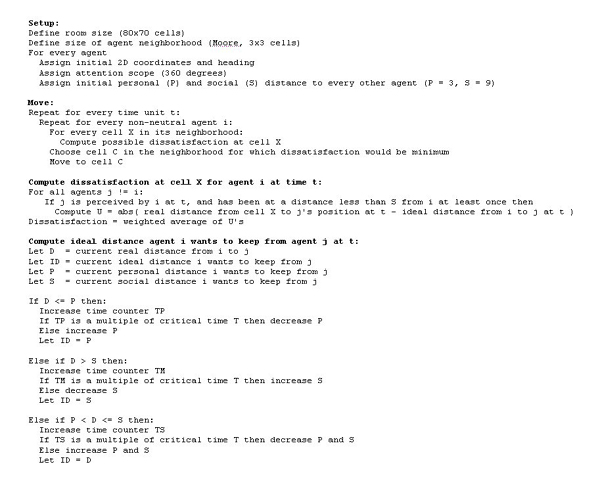
| Figure 2. Pseudocode of program P-Space, indicating how ideal, personal, and social distances are updated according to changes in real distance between the agents |
| Table 1: Parameter T and k values used in the simulation | ||
| Condition | Parameter T | Parameter k |
| A | 100 | 0.5 |
| B | 100 | 0.05 |
| C | 10 | 0.5 |
| D | 10 | 0.05 |
|
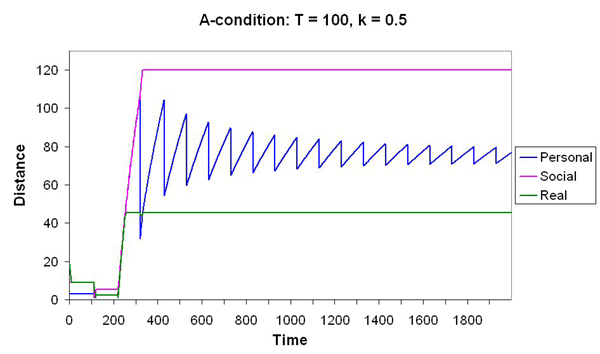
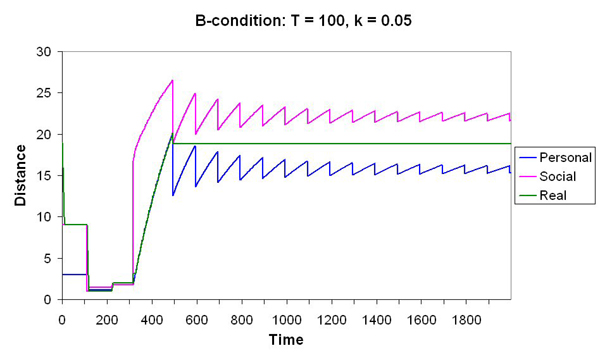
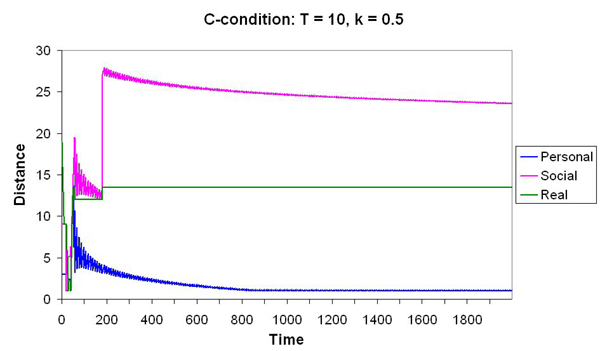
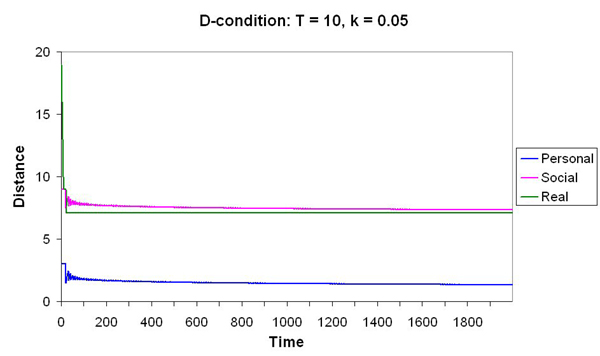
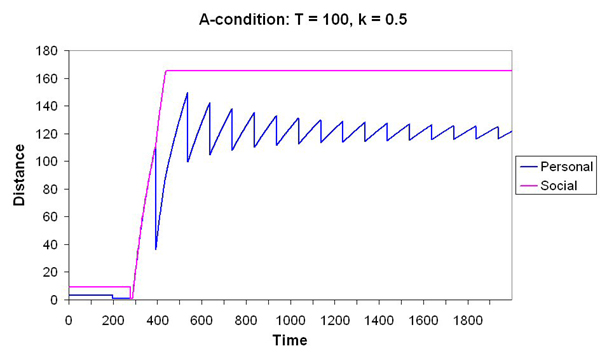
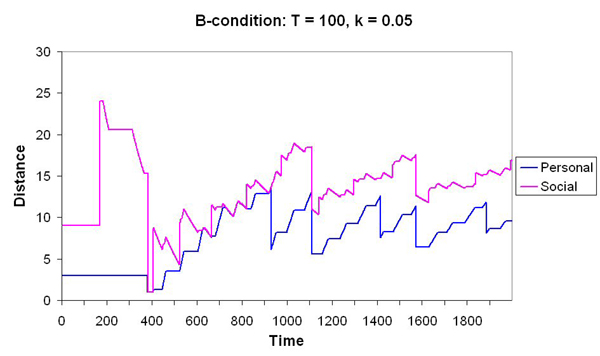
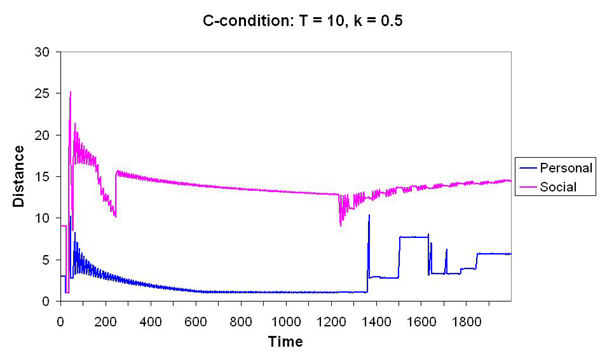
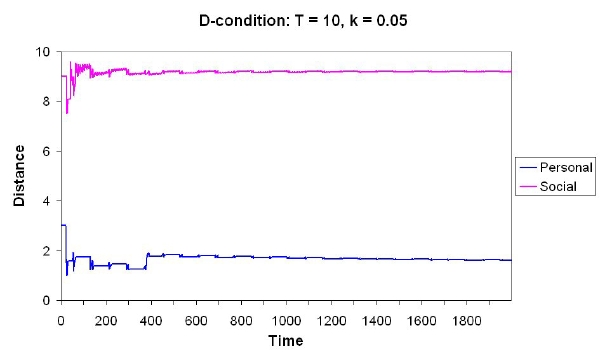
| Figure 3. Evolution of personal, social, and real distances over time under simulation conditions A, B, C, and D. Distances for Agent 1 were governed by parameters T and k, which are shown in the figure. Agent 2 was immobile and neutral |
|
| Figure 4. Evolution of personal and social distances over time for conditions A, B, C, and D. Distances for Agent 1 were governed by parameters T and k, which are shown in the figure. Agent 2 was neutral and moved randomly |
|
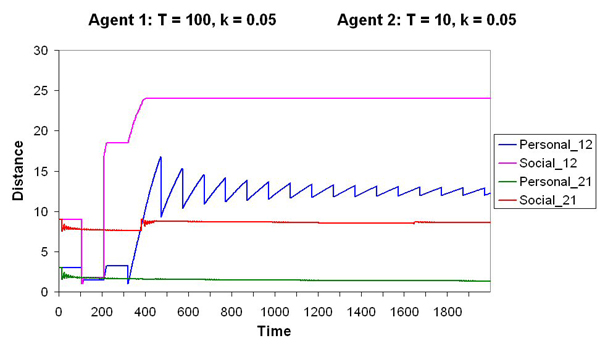
| Figure 5. Evolution of personal and social distances between Agents 1 and 2 over time during the simulation |
| Table 2: Values of parameters T and k. The ideal distances for each agent (rows) towards each other agent (columns) was computed in accordance with T and k values under conditions B, C, and D (for more details, see Table 1) | ||||
| Agent | ||||
| 1 | 2 | 3 | ||
| Agent | 1 | - | B | C |
| 2 | B | - | C | |
| 3 | D | B | - | |
DARLEY V (1994) "Emergent phenomena and complexity". In Brooks R A and Maes P (Eds.) Artificial Life IV: Proceedings of the fourth international workshop on the synthesis and simulation of the living systems, Cambridge, Massachusetts: MIT Press.
HALL E T (1966) The hidden dimension. Garden City, New York: Doubleday.
HAYDUK L A (1983) Personal space: Where we now stand. Psychological Bulletin, 94 (82). pp. 293-335.
HEGSELMANN R (1996) "Understanding social dynamics: The cellular automata approach". In Troitzsch, K G, Mueller U, Gilbert G N and Doran, J E (Eds.) Social science simulation, Berlin: Springer (pp. 282-306).
HEGSELMANN R and Flache A (1998) Understanding complex social dynamics: A plea for cellular automata based modelling. Journal of Artificial Societies and Social Simulation [on line], 1 (3). Available: https://www.jasss.org/1/3/1.html.
NOWAK A, Szamrej J and Latané B (1990) From private attitude to public opinion: A dynamic theory of social impact. Psychological Review, 97 (3). pp. 362-376.
QUERA V, Beltran F S, Solanas A, Salafranca L and Herrando S (2000) "A dynamic model for inter-agent distances". In Meyer J A, Berthoz A, Floreano D, Roitblat H L and Wilson S W (Eds.) From animals to animats (Vol. 6. Supplement), Honolulu: The International Society for Adaptive Behavior (pp. 304-313).
QUERA V, Solanas A, Salafranca L, Beltran F S and Herrando S (2000) P-SPACE: A program for simulating spatial behavior in small groups. Behavior Research Methods, Instruments, and Computers, 32 (1). pp. 191-196.
SAKODA J M (1971) The checkerboard model of social interaction. Journal of Mathematical Sociology, 1. pp. 119-132.
SCHELLING T (1969) Models of segregation. American Economic Review, 59, 488-493.
SCHRECKENBERG M and Sharma S D (Eds.) (2002) Pedestrian and evacuation dynamics. New York: Springer.
 Return to Contents of this issue
Return to Contents of this issue
© Copyright Journal of Artificial Societies and Social Simulation, [2006]