
Peter Andras, John Lazarus, Gilbert Roberts and Steven J Lynden (2006)
Uncertainty and Cooperation: Analytical Results and a Simulated Agent Society
Journal of Artificial Societies and Social Simulation
vol. 9, no. 1
<https://www.jasss.org/9/1/7.html>
For information about citing this article, click here
Received: 05-Jun-2005 Accepted: 03-Dec-2005 Published: 31-Jan-2006

 Abstract
Abstract
|
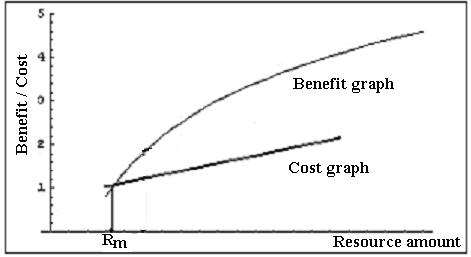
| Figure 1. The determination of the minimum acceptable amount of resources: the horizontal axis shows the amount of resources; the vertical axis shows the expected benefits gained from a given amount of resources and also the corresponding expected cost of the exploration; the curved continuous line is the graph of the expected benefits (a diminishing returns graph); the continuous straight line is the graph of expected costs; the minimum acceptable amount of resources Rm is the resource value for which the cost and benefit curves intersect. |
|
|
(1) |
We assume that the harshness of the environment is not excessive, in the sense that more than half of the full resource distribution is in the acceptable range of individuals, i.e.
|
|
(2) |

|
(3) |
|
(4) |
Where μs is the mean of the perceived resource distribution. (We note that replacing the ignored part of the environmental resource distribution with the above specified Dirac δ distribution, means that in terms of mean and variance calculations we do not ignore the segment of the perceived distribution between 0 and Rm, instead for this portion we consider the Dirac δ component of the perceived resource distribution.)
|
(5) |
where μ is the mean of the environmental resource distribution.
|
|
(6) |
it can be proven that
|
|
(7) |
We also have that
|
(8) |
|
|
(9) |
If R∈[0,Rm]. So, combining equations (5) and (9) we deduce that

|
(10) |
showing that the perceived uncertainty is higher than the environmental uncertainty.
|
(11) |
where the subscript 'coop' refers to those agents who benefit from cooperation, 'cheat' refers to agents that cheat, 'suck' refers to agents that are cheated, 'no' refers to agents which do not participate in sharing interactions, and r is the amount by which the resource distribution is shifted for the cheating (to the right, i.e. +r) and cheated agents (to the left, i.e. -r);
|
(12) |
where
|
|
(13) |
and σ2coop is the variance of the resource distribution for those who benefit from cooperation, σ2cheat is the variance of the resource distribution for those who cheat, σ2suck is the variance of the resource distribution for those who are cheated, and σ2no is the variance of the resource distribution for those who do not participate in sharing interaction with others.
|
|
(14) |
and
|
|
(15) |
|
|
(16) |
|
(17) |
| Table 1: The pay-off matrix for the cooperation / cheating game. Entries indicate the payoffs to the row player followed by the column player. R1 and R2 are the amount of resources of the row and column player respectively, and Δ=[f(R1+R2)-f(R1)-f(R2)]+ (i.e., it takes only the positive values of the expression in brackets and it is zero if the value of the expression is negative). The function f is a diminishing return function, and R1 and R2 are typically in the range where 2f(x) ≤ f(2x), and 0 < a < 1. | ||
| μX | Cooperate | Cheat |
| Cooperate | f(R1)+Δ/2, f(R2)+Δ/2 | a·f(R1), f(R2)+Δ |
| Cheat | f(R1)+Δ, a·f(R2) | f(R1), f(R2) |
|
|
(18) |
where μ is the mean and σR is the variance of resources in the current population of agents, and b1, b2, n0 are parameters. The offspring share equally the resources of their parent. The offspring start their life from their parent's last location with minor random changes, implying that the offspring of each agent will be closely packed at the beginning of their life. The cluster of offspring diffuses with time, as the offspring make their random movements. The generation of offspring guarantees the evolutionary change in the population of our agents. Successful agents produce many offspring, while unsuccessful agents produce few or no offspring. The success of the agents (i.e. the amount of resources that they accumulate) depends on their inclination to cooperation / cheating and on the uncertainty of their environment.
|
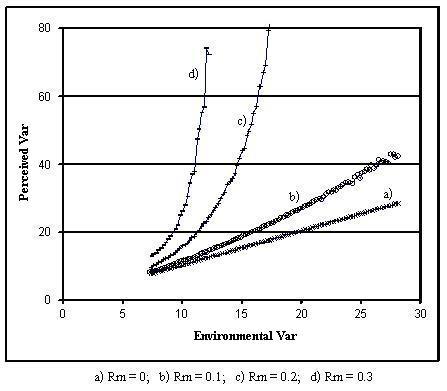
| Figure 2. The relationship between the environmental and perceived variances for different resource amount cut-off points |
|
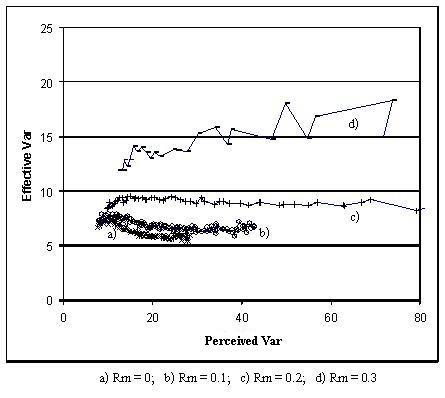
| Figure 3. The relationship between the perceived and effective variances for different resource amount cut-off points |
|
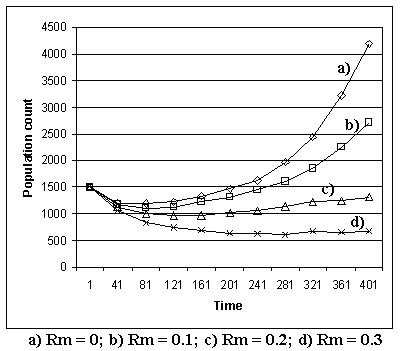
| Figure 4. The evolution of the average population count (the size of the population) calculated for the four simulation cases with different cut-off points |
ANDRAS P, Roberts G, and Lazarus J (2003) Environmental risk, cooperation and communication complexity. In Adaptive Agents and Multi-Agent Systems, (eds Alonso E, Kudenko D, and Kazakov D) pp. 49-65. Springer-Verlag, Berlin.
AXELROD R and Hamilton W D (1981) The evolution of cooperation. Science, 211, pp.1390-1396.
BOWERS M A (1988) Seed removal experiments on desert rodents: the microhabitat by moonlight effect. Journal of Mammalogy, 69, pp.201-204.
FEHR E and Fischbacher U (2003) The nature of human altruism. Nature, 425, pp.785-791.
FEHR E and Rockenbach B (2003) Detrimental effects of sanctions on human altruism. Nature, 422, pp.137-140.
HAY M E and Fuller P J (1981) Seed escape from heteromyid rodents: the importance of microhabitat and seed preference. Ecology, 62, pp.1395-1399.
KAMEDA, T Takezawa, M, Tindale, R and Smith, C (2002) Social sharing and risk reduction: Exploring a computational algorithm for the psychology of windfall gains. Evolution and Human Behavior, 23, pp.11-33.
MILINSKI M, Semmann D, and Krambeck H J (2002) Reputation helps solve the 'tragedy of the commons'. Nature, 415, pp.424-426.
NOWAK M A and Sigmund K (1998) Evolution of indirect reciprocity by image scoring. Nature, 393, pp.573-577.
OSTROM, E (1990) Governing the Commons: The Evolution of Institutions for Collective Action. Cambridge: Cambridge University Press.
RIOLO R, Cohen M D, and Axelrod R (2001) Evolution of cooperation without reciprocity. Nature, 414, pp.441-443.
ROBERTS G and Sherratt T N (1998) Development of cooperative relationships through increasing investment. Nature, 394, pp.175-179.
 Return to Contents of this issue
Return to Contents of this issue
© Copyright Journal of Artificial Societies and Social Simulation, [2006]