
Dietrich Stauffer, Adriano Sousa and Christian Schulze (2004)
Discretized Opinion Dynamics of The Deffuant Model on Scale-Free Networks
Journal of Artificial Societies and Social Simulation
vol. 7, no. 3
<https://www.jasss.org/7/3/7.html>
To cite articles published in the Journal of Artificial Societies and Social Simulation, reference the above information and include paragraph numbers if necessary
Received: 23-Oct-2003 Accepted: 23-Mar-2004 Published: 30-Jun-2004
 Abstract
Abstract
|
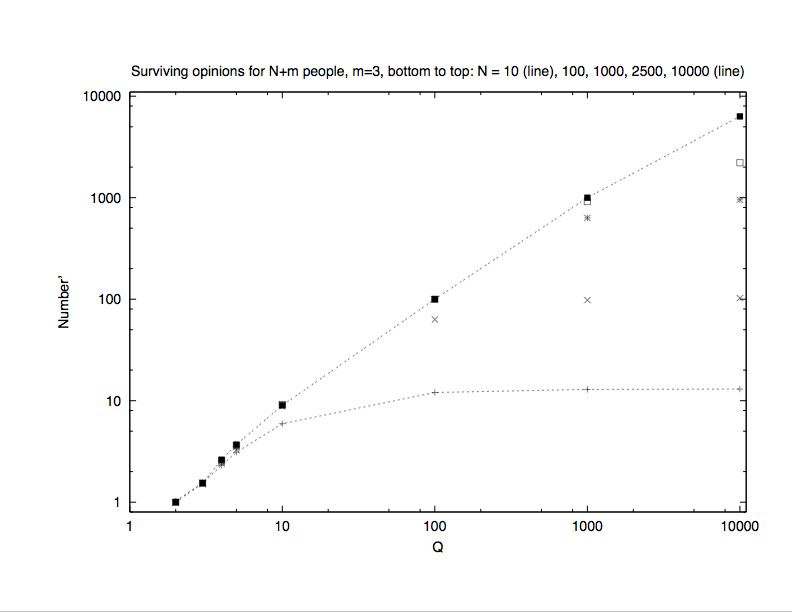
| Figure 1. Number of different surviving opinions versus total number Q of opinions, for various network sizes N. Data for N = 10 and N = 105 are connected by lines. |
|
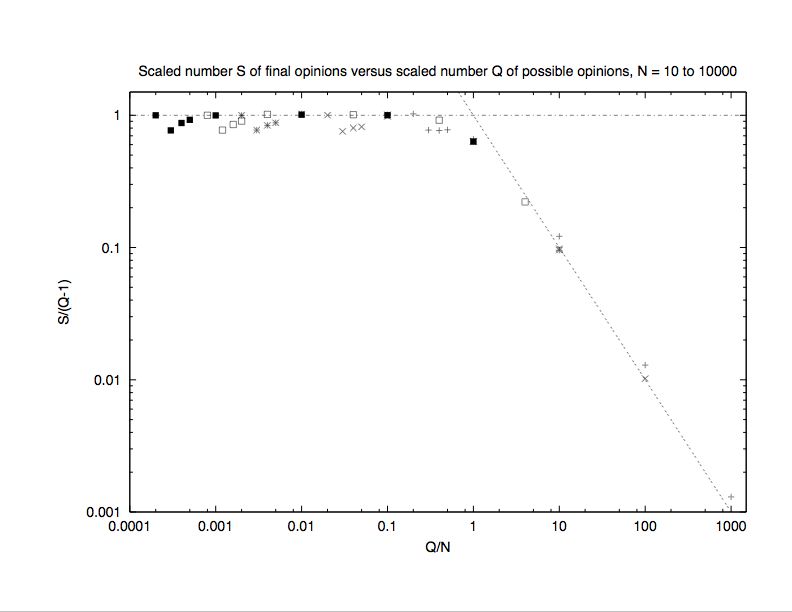
| Figure 2. Scaled plot of the same data as in Fig.1. The straight lines indicate the ”trivial” scaling limit: Everybody keeps its own opinion in the right part, and each opinion is shared by many in the left part. |


 . In this sense the new results are in between the intensive S of (Deffuant 2000; Deffuant 2002; Weisbuch 2002; Ben-Naim 2003) and the extensive S of (Stauffer 2004). (Also in contrast
to (Stauffer 2004), the histograms for the number of people sharing the same opinion
show a single peak. As in (Stauffer 2004) people may share the same opinion even if they
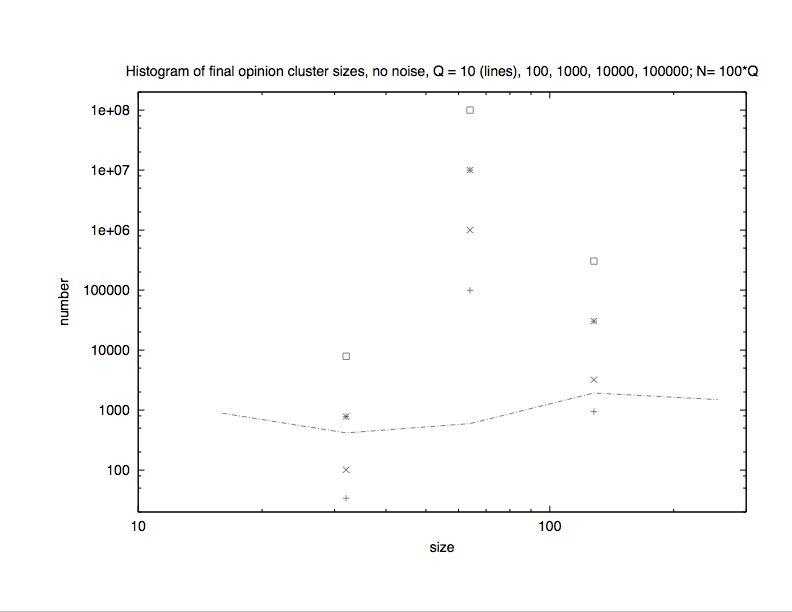
are disconnected.) Figure 3 shows that for a fixed ratio N/Q = 100 the cluster numbers are
extensive.
. In this sense the new results are in between the intensive S of (Deffuant 2000; Deffuant 2002; Weisbuch 2002; Ben-Naim 2003) and the extensive S of (Stauffer 2004). (Also in contrast
to (Stauffer 2004), the histograms for the number of people sharing the same opinion
show a single peak. As in (Stauffer 2004) people may share the same opinion even if they
are disconnected.) Figure 3 shows that for a fixed ratio N/Q = 100 the cluster numbers are
extensive.
|
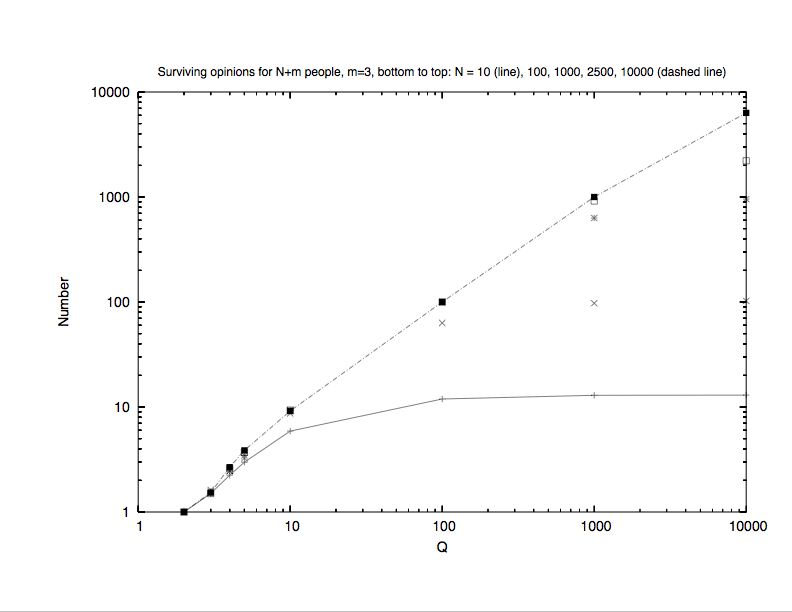
| Figure 3. Evidence that cluster numbers for fixed N/Q (here taken as 100) are extensive, for large systems up to 10 million nodes, with N and Q increasing from bottom to top. For small systems the results (line) are very different. All data are summed over 1000 runs. |
|
|
| Figure 4. As Fig.1, but with noise, for N = 10 (curve) to 10000. The straight line gives S = Q. For smaller Q at N > 100, no convergence within 106 iterations was found. |
 of (Deffuant 2000; Deffuant 2002; Weisbuch 2002) was taken as 0.11/2. Figure 5 shows
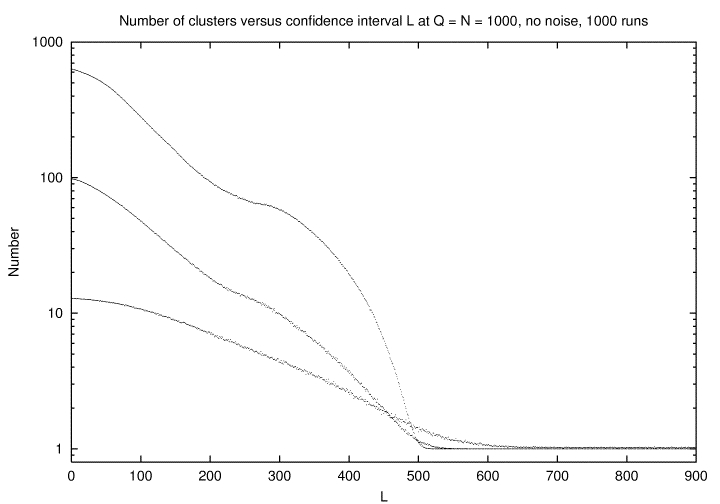
the variation of the number of surviving opinions with L, at fixed Q = 1000 and various
N. No noise is used here since noise prevents convergence except for very small L. For
Q = N = 5L the number of opinion clusters seems to vary proportional to N for large
N.
of (Deffuant 2000; Deffuant 2002; Weisbuch 2002) was taken as 0.11/2. Figure 5 shows
the variation of the number of surviving opinions with L, at fixed Q = 1000 and various
N. No noise is used here since noise prevents convergence except for very small L. For
Q = N = 5L the number of opinion clusters seems to vary proportional to N for large
N.
|
| Figure 5. As Fig.1, no noise, for Q = 1000 as a function of the length L = Qd of the confidence interval, for N = 10, 100, 1000 (from bottom to top). The larger N is the more pronounced is the transition to complete consensus at L = 500 or d = 1/2. |
 k-
k- , where k is number of
neighbours (degree or connectivity) of the node and
, where k is number of
neighbours (degree or connectivity) of the node and 
 1 (everyone in the network knows each
other).
1 (everyone in the network knows each
other).
| (a) |
|
| (b) |
|
| (c) |
|
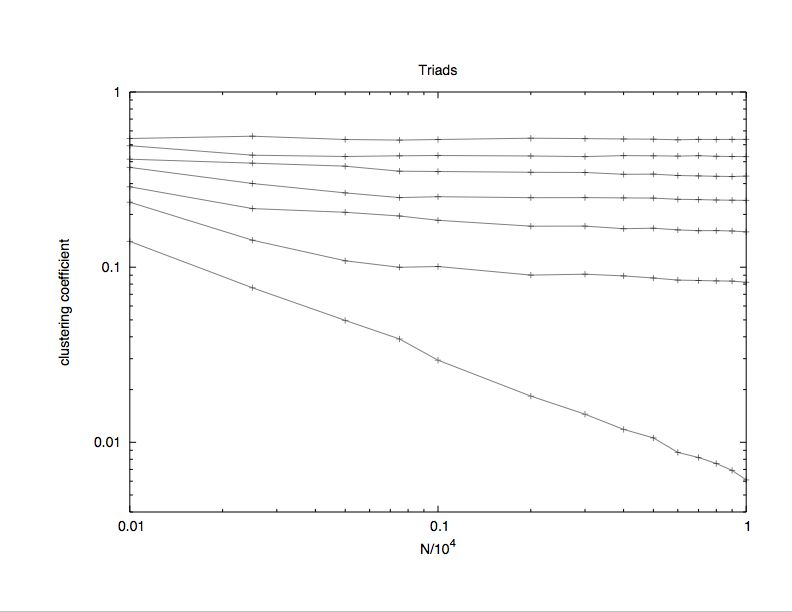
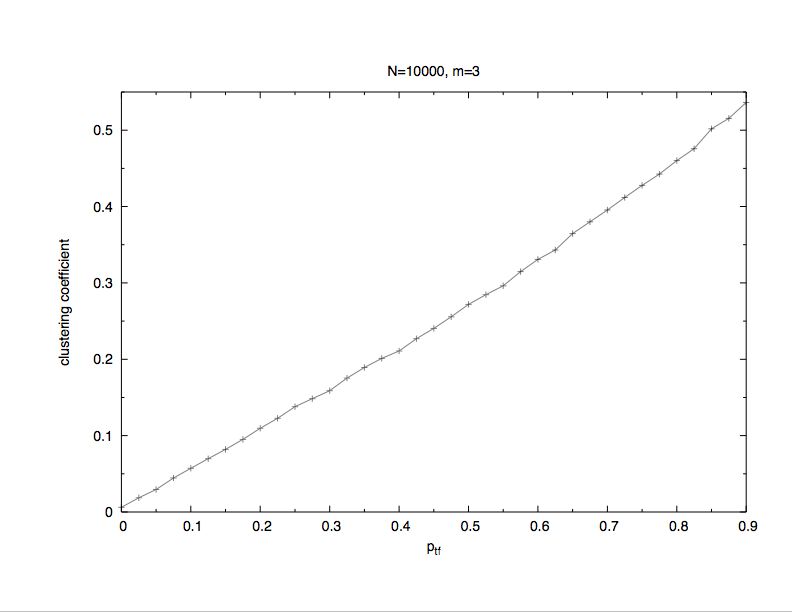
| Figure 6. Triad formation: a) Log-log plot: Clustering coefficient versus the network size N at probability ptf = 0.00, 0.15, 0.30, 0.45, 0.60, 0.75. 0.90 (from bottom to top) to perform a triad formation step. b) Linear plot: Clustering coefficient versus the probability ptf to perform a triad formation step at N = 104. c) Log-log plot: Number of different surviving opinions versus total number Q of opinions, for various network sizes N on a scale-free network with triad formation step. The triad formation probability is ptf = 0.3 | |
|
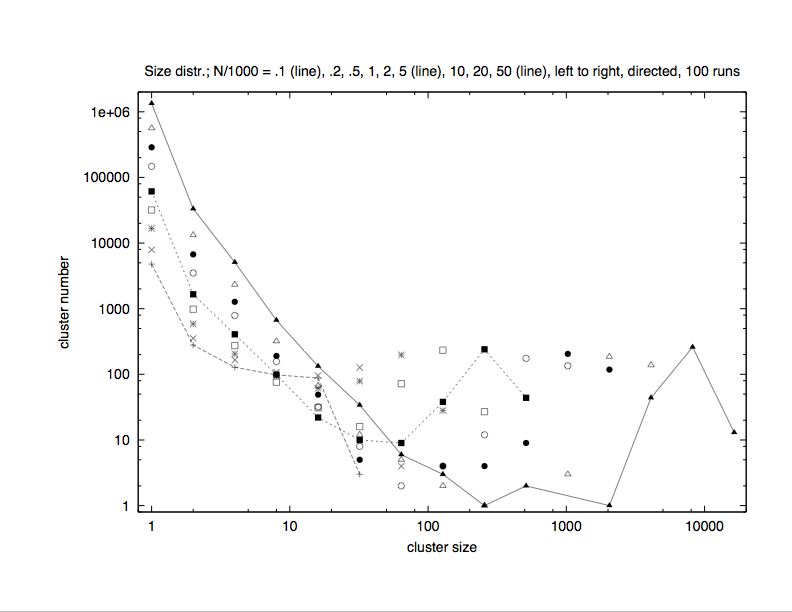
| Figure 7. Size distribution for the clusters of different surviving opinions, summed over 100 samples, for network sizes N = 1000...50, 000 on the directed a scale-free network with continuous opinions as in the standard model (Deffuant 2000; Deffuant 2002; Weisbuch 2002). |
|
|
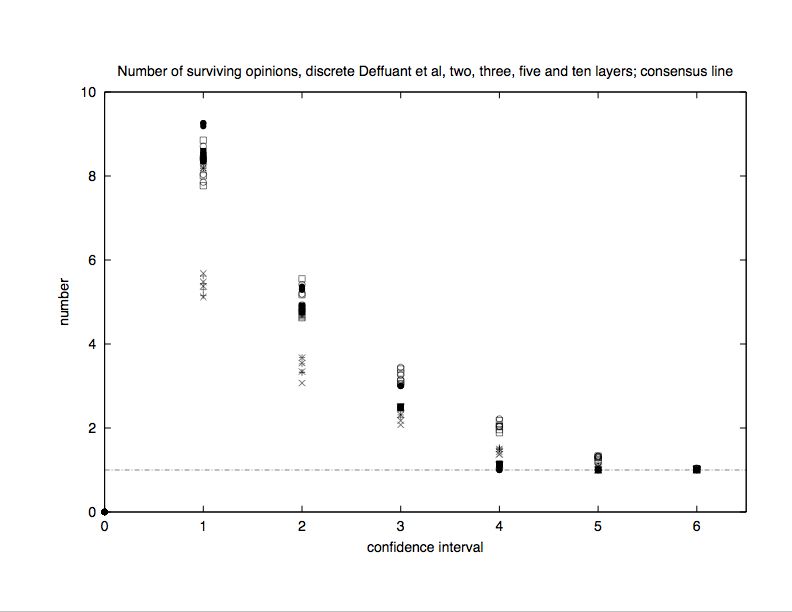
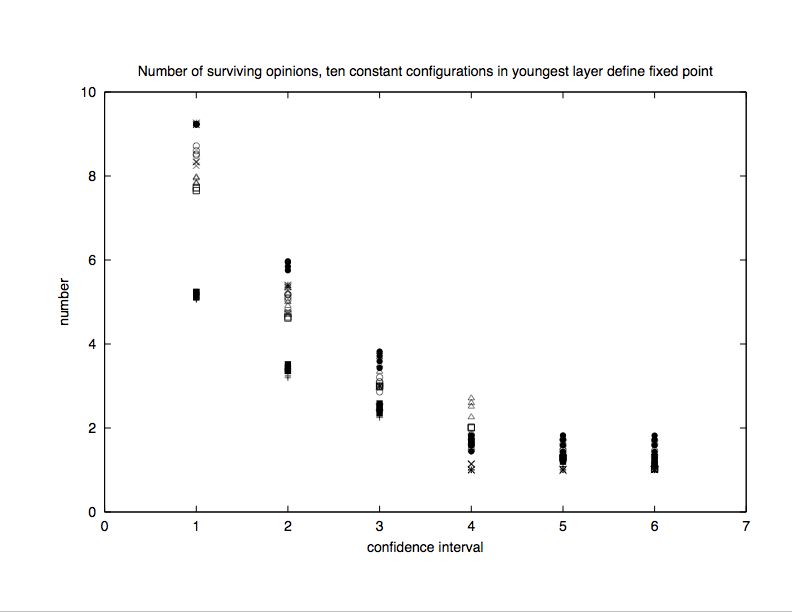
| Figure 8. Multilayer model: Number of different surviving opinions versus confidence interval L for Q = 10 possible opinions. (For Q = 100 instead of 10 we plot the number versus L/10 instead of versus L, also in Figures 9 and 10.) We see complete consensus for L/Q > 0.6. Part (a) stops the simulation if in the whole system no one changed opinion during one iteration, while in part b we stopped it if the baby layer did not change over ten consecutive iterations. |
|
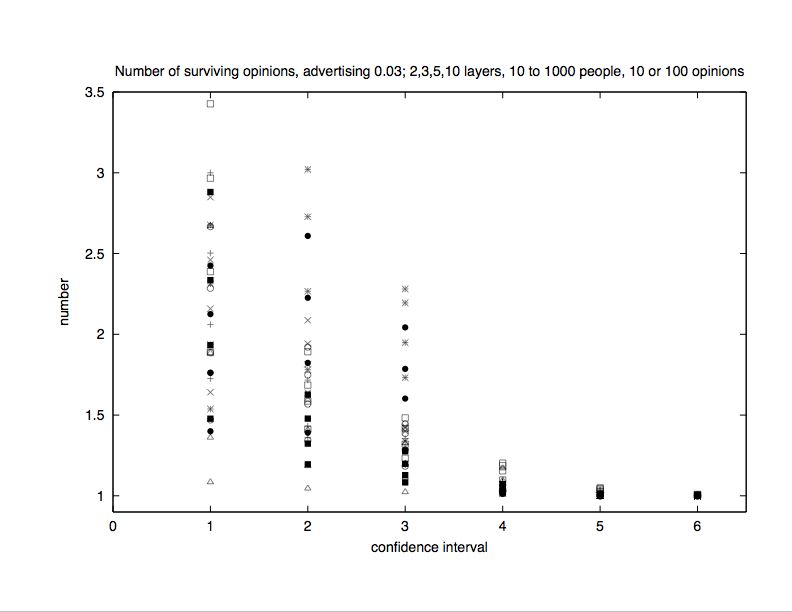
| Figure 9. Number of different surviving opinions versus L in multilayer model in case of advertising. For a monolayer this number increases up to nearly 8. |
|
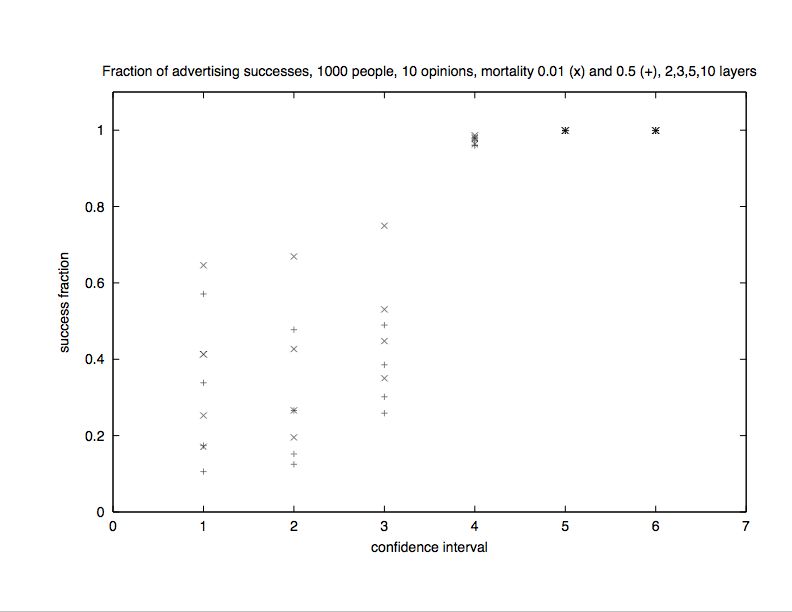
| Figure 10. Fraction of advertising successes in multilayer model. For a monolayer the results for L/Q > 0.4 are similar but for L/Q = 0.1 the success fraction is at most 0.1. And for Q = 100 the monolayer success ratio was even lower. |
parameter(nsites=10 ,m=3,iseed=4711,maxt=1000000,iq=1000
1 ,nrun=1000,max=nsites+m, length=1+2*m*nsites+m*m) integer*8 ibm,mult dimension list(length),neighb(max,m),is(max),nhist(0:iq), 1 number(max), ns(31),irand(0:3) data irand/0,0,-1,1/ w=sqrt(0.1) print 100, iq, nsites, m, iseed, maxt, nrun, w 100 format('# directed, more confidence', 6i9,f6.3) factor=(0.25d0/2147483648.0d0)/2147483648.0d0 facto2=factor*2*iq mult=13**7 mult=mult*13**6 ibm=2*iseed-1 do 35 idis=100,900,100 derrisum=0.0 do 16 i=1,31 16 ns(i)=0 ict=0 do 17 irun=1,nrun do 29 n=1,max 29 number(n)=0 do 7 i=1,m do 7 nn=1,m neighb(i,nn)=nn 7 list((i-1)*m+nn)=nn L=m*m c All m initial sites are connected with each other and themselves do 1 i=m+1,max do 2 new=1,m 4 ibm=ibm*16807 j=1+(ibm*factor+0.5)*L if(j.le.0.or.j.gt.L) goto 4 j=list(j) list(L+new)=j list(L+m+new)=i 2 neighb(i,new)=j 1 L=L+2*m c end of network and neighbourhood construction, start of opinion change n=max do 5 i=1,n ibm=ibm*16807 5 is(i)=1+iabs(ibm)*facto2 c print *, is do 9 iter=1,maxt ichange=0 do 10 j=1,n 6 ibm=ibm*16807 i=1+(ibm*factor+0.5)*m if(i.le.0.or.i.gt.m) goto 6 i=neighb(j,i) if(is(i).eq.is(j) .or. iabs(is(i)-is(j)).gt.idis) goto 12 ichange=ichange+1 if(iabs(is(i)-is(j)).eq.1) then ibm=ibm*16807 if(ibm.lt.0) then is(i)=is(j) else is(j)=is(i) end if else idiff=isign(ifix(0.5+w*iabs((is(i)-is(j)))),is(i)-is(j)) is(j)=is(j)+idiff is(i)=is(i)-idiff endif c10 print *, iter, is(j) 12 continue c ibm=ibm*mult c index=ishft(ibm,-62) c noise c is(j)=min0(iq,max0(irand(index)+is(j),1)) 10 continue c if(iter.eq.(iter/1000 )*1000 ) print *, iter,ichange if(ichange.eq.0) goto 11 9 continue print *, 'not converged' 11 continue do 28 i=0,iq 28 nhist(i)=0 do 25 i=1,n j=is(i) 25 nhist(j)=nhist(j)+1 c print *, iter, nhist icount=0 do 27 i=1,iq if(nhist(i).gt.0) icount=icount+1 if(icount.gt.0) number(icount)=number(icount)+nhist(i) 27 continue ict=ict+icount c print *, irun,icount,iter icount=0 do 33 i=1,max 33 icount=icount+number(i) derrida=0.0 fact=1.0/icount**2 do 34 i=1,max 34 derrida=derrida+fact*number(i)**2 do 31 i=1,max if(number(i).eq.0) goto 31 ibin=1+alog(float(number(i)))/0.69315 ns(ibin)=ns(ibin)+1 31 continue c print *, irun,icount,iter,iq,derrida derrisum=derrisum+derrida 17 continue derrida=derrisum/nrun c do 32 i=1,31 c32 if(ns(i).gt.0) print *, 2**(i-1), ns(i) call flush(6) 35 print *, idis, ict*1.0/nrun, derrida stop end |
ALBERT, R. and Barabási, A.L. (2002), “Statistical mechanics of Complex networks”, Rev. Mod. Phys. 74, pp. 47-97.
AXELROD, R. (1997), “The Dissemination of Culture: A Model with Local Convergence and Global Polarization”, J. Conflict Resolut. 41, pp. 203-226; The Complexity of Cooperation: Agent-Based Models of Competition and Collaboration, Princeton University Press, Princeton NJ.
BARABÁSI, A.L. (2002), Linked: The New Science of Networks, Perseus Books Group, Cambridge MA.
BEN-NAIM, E., Krapivsky, P. and Redner, S. (2003), “Bifurcations and Patterns in Compromise Processes”, Physica D 183, pp. 190-204.
DAVIDSEN, J., Ebel, H. and Bornholdt, S. (2002), “Emergence of a small world from local interactions: Modeling acquaintance networks”, Phys.Rev.Letters 88, pp. 128701-1-128701-4.
DEFFUANT, G., Amblard, F., Weisbuch G. and Faure, T. (2002), “How can extremism prevail? A study based on the relative agreement interaction model”, Journal of Artificial Societies and Social Simulation 5 (4), paper 1 (https://www.jasss.org/5/4/1.html).
DEFFUANT, G., Neau, D. Amblard, F. and Weisbuch, G. (2000), “Mixing beliefs among interacting agents. Advances in Complex Systems”, Adv. Complex Syst. 3, pp. 87-98.
DERRIDA, B. and Flyvbjerg, H. (1986), “Multivalley structure in Kauffman’s model: analogy with spin glasses”, J. Phys. A 19, pp. L1003-L1008.
GALAM, S. (1990), “Social paradoxes of majority rule voting and renormalisation group”, J. Stat. Phys. 61, pp. 943-951 (1990).
GALAM, S. (1997), “Rational Group Decision Making: a random field Ising model at T=0”, Physica A 238, pp. 66-80.
HEGSELMANN, R. and Krause, U. (2002), “Opinion Dynamics and Bounded Confidence Models, Analysis and Simulation”, Journal of Artificial Societies and Social Simulation 5 (3), paper 2 (https://www.jasss.org/5/3/2.html).
HEGSELMANN, R. and Krause, U. (2004), “ Opinion Dynamics Driven by Various Ways of Averaging”, Physica A (in press) = http://pe.uni-bayreuth.de/?coid=18.
HOLME, P. and Kim, B.J. (2002), “Growing scale-free networks with tunable clustering”, Phys. Rev. E 65, pp. 026107-1-026107-4.
KRAUSE, U. (1997), “Soziale Dynamiken mit vielen Interakteuren. Eine Problemskizze”. In Krause, U. and Stöckler, M. (Eds.), Modellierung und Simulation von Dynamiken mit vielen interagierenden Akteuren, pp. 37-51, Bremen University, Bremen.
MOSS DE OLIVEIRA, S., de Oliveira, P.M.C. and Stauffer, D. (1999): Evolution, Money, War and Computers, Teubner, Stuttgart and Leipzig.
SCHULZE, C. (2003), “Advertising in the Sznajd Marketing Model”, Int. J. Mod. Phys. C 14, pp. 95-98.
SCHULZE, C. (2004), “Advertising, consensus, and ageing in multilayer Sznajd model”, Int. J. Mod. Phys. C 15, No. 4 (in press) = cond-mat/0312342.
SCHWEITZER, F. (2003), Brownian Agents and Active Particles, Springer, Berlin.
STAUFFER, D. (2002), “Monte Carlo simulations of Sznajd models”, Journal of Artificial Societies and Social Simulation 5 (1), paper 4 (https://www.jasss.org/5/1/contents.html).
STAUFFER, D. (2003), “Sociophysics Simulations”, Computing in Science and Engineering 5 (3), pp. 71-75; “How to Convince Others? Monte Carlo Simulations of the Sznajd Model” , in AIP Conference Proceedings, The Monte Carlo Method on the Physical Sciences: Celebrating the 50th Anniversary of the Metropolis Algorithm, edited by Gubernatis, J.E., 690, pp. 147-155 = cond-mat/0307133.
STAUFFER, D., Sousa, A.O and Moss de Oliveira, S. (2000), “Generalization to Square Lattice of Sznajd Sociophysics Model”, Int. J. Mod. Phys. C 11, pp. 1239-1245.
STAUFFER, D. and Meyer-Ortmanns, H. (2004), “Simulation of Consensus Model of Deffuant et al on a Barabasi-Albert Network”, Int. J. Mod. Phys. C 15 (2) 241 - 246.
SZABÓ, G., Alava, M. and Kertész, J. (2003), “Structural transitions in scale-free networks”, Phys. Rev. E 67, pp. 056102-1-056102-1.
SZNAJD-WERON, K. and Sznajd, J. (2000), “Opinion Evolution in Closed Community”, Int. J. Mod. Phys. C 11, 1157 - 1166.
SZNAJD-WERON, K. and Weron, R.(2003), “How effective is advertising in duopoly markets?”, Physica A 324, pp. 437-444.
WEIDLICH, W. (2000), Sociodynamics; A Systematic Approach to Mathematical Modelling in the Social Sciences, Harwood Academic Publishers, Amsterdam.
WEISBUCH, G., Deffuant, G., Amblard, F. and Nadal, J.-P. (2002), “Meet, Discuss, and Segregate!”, Complexity 7, pp. 55-63.
WEISBUCH, G. (2004), “Bounded confidence and social networks”, Eur. Phys. J. B, Special Issue: Application of Complex Networks in Biological Information and Physical Systems volume 38, pp.339-343.
 Return to Contents of this issue
Return to Contents of this issue
© Copyright Journal of Artificial Societies and Social Simulation, [2004]