
Catherine Dibble and Philip G. Feldman (2004)
The GeoGraph 3D Computational Laboratory: Network and Terrain Landscapes for RePast
Journal of Artificial Societies and Social Simulation
vol. 7, no. 1
To cite articles published in the Journal of Artificial Societies and Social Simulation, please reference the above information and include paragraph numbers if necessary
<https://www.jasss.org/7/1/7.html>
Received: 10-Jan-2004 Accepted: 10-Jan-2004 Published: 31-Jan-2004
 Abstract
Abstract
|
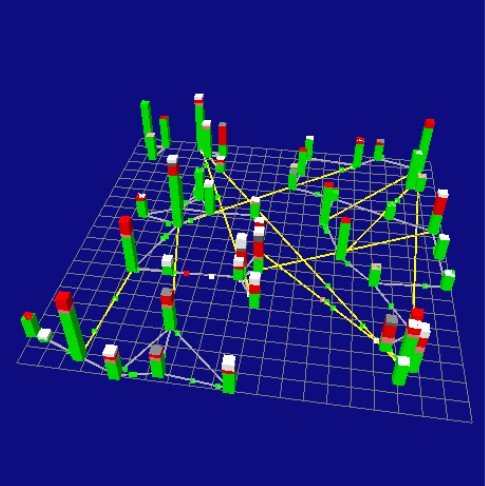
Figure 1: A GeoGraph model of SARS, where individual agents travel between communities and bar charts for each community show the epidemiological status of its population. Green agents are healthy, pink are infected, red are sick, gray are dead, and white are recovered and immune. The model includes super-spreader events and seasonally adjusted infectivity. Gray links are base links, such as highways or trains, yellow links are high-speed shortcuts in the landscape such as airline routes. |
|
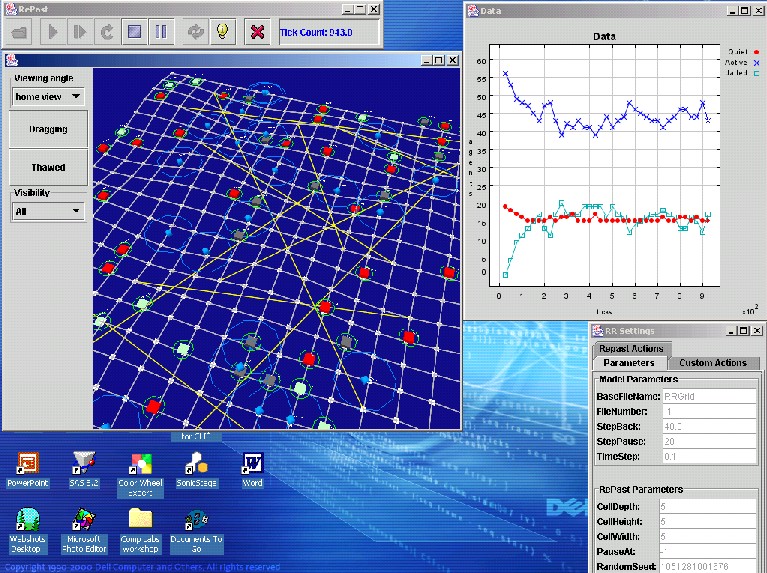
Figure 2: GeoGraph Rumors and Looting extensions to the grid-based Brookings Civil Violence model (Epstein et al. 2001). Red squares are looting civilians, green squares are peaceful civilians, gray squares are temporarily arrested civilians; blue dots are peacekeepers; rings around agents show how far each can see. Yellow lines are shortcuts in the landscape. |
|
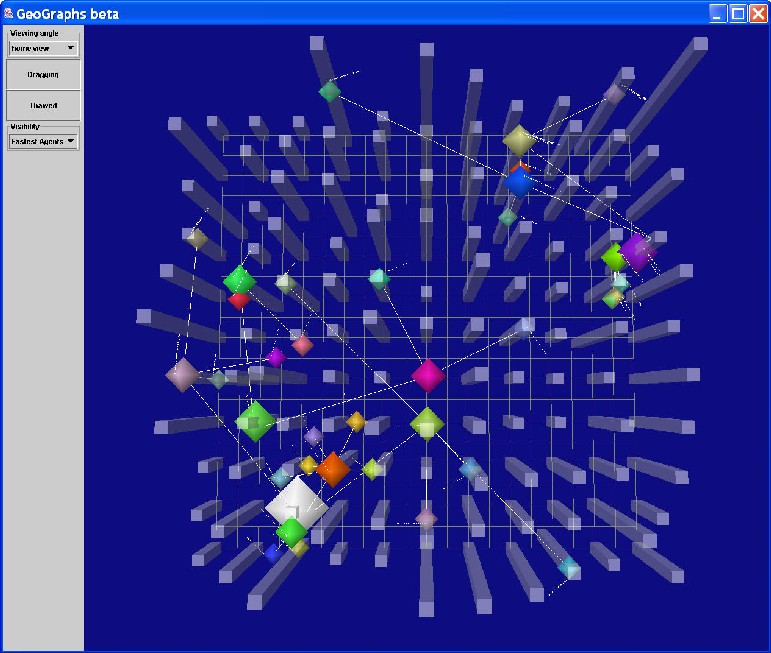
Figure 3: Full-screen top view of the main GeoGraph Teams simulation window. This is a dynamic simulation with agents moving around the landscape in order to address pillars of resources or targets. Gray pillars are stocks of food or other resources to be looted or protected, targets of opportunity to be attacked, or other trouble to be addressed. In this example, pillars represent food and agents are indigenous Warlord Generals, Lieutenants, and Soldiers. |
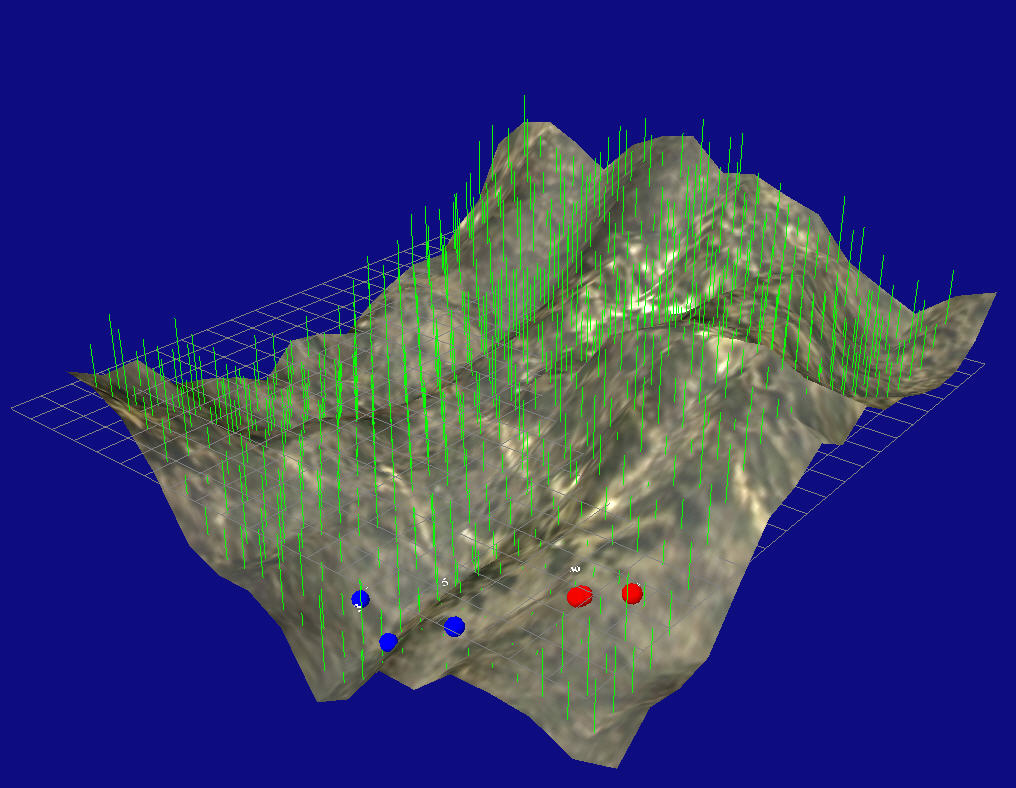
Finally, GeoGraphs have a class of parameter-driven synthetic three-dimensional fractal terrain landscapes. See Figure 4 for an example.
|
Figure 4: A GeoGraph parameter-driven synthetic three-dimensional fractal terrain landscape with parameterized renewable green “tree” agents and small flocks of “deforestation” red and blue agents. |
|
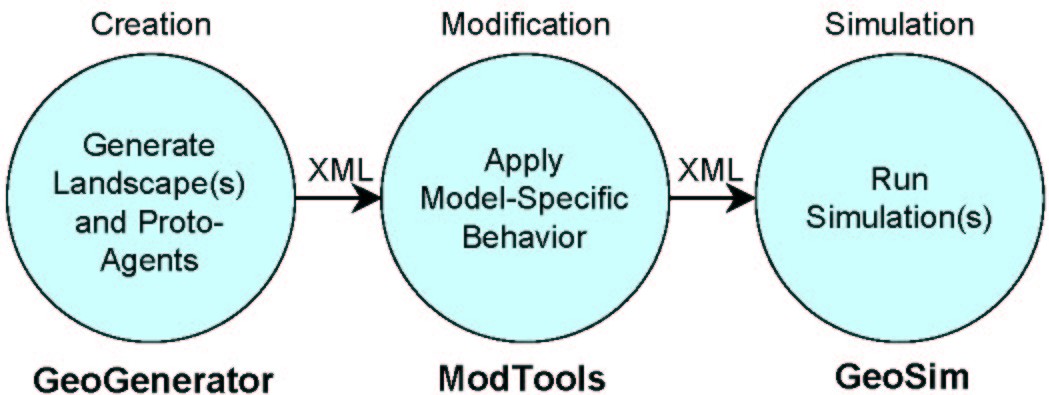
Figure 5: GeoGraph Components. Each of the three can be run either interactively, for visualization, or in batch mode to generate input files for many simulations at a time. |
DeCANIO, Stephen J., Catherine Dibble, and Keyvan Amir-Atefi. 2001. Organizational Structure and the Behavior of Firms: Implications for Integrated Assessment. Climatic Change 48: 487-514. http://econ.ucsb.edu/~decanio/complab/papers/twotask6.html
DeCANIO, Stephen J., Catherine Dibble, and Keyvan Amir-Atefi. 2000. The Importance of Organizational Structure for the Adoption of Innovations. Management Science 46, no. 10: 1285-29. http://econ.ucsb.edu/~decanio/complab/papers/orgbar.html
DIBBLE, Catherine. 2003. "GeoGraphs Home Page." Web page. Available at http://www.geog.umd.edu/complab/complab/geographs.shtml
EPSTEIN, Joshua M., John D. Steinbruner, and Miles T. Parker. 2001. Modeling Civil Violence: An Agent-Based Computational Approach. Brookings Institution, Center on Social and Economic Dynamics, Working Paper Number 20, January 2001. http://www.brookings.edu/dybdocroot/es/dynamics/papers/cviolence/cviolence.pdf
EPSTEIN, Joshua M., Derek A. Cummings, Shubha Chakravarty, Ramesh M. Singa, and Donald S. Burke. 2002. Toward a Containment Strategy for Smallpox Bioterror: An Individual-Based Computational Approach. Brookings Institution, Center on Social and Economic Dynamics, Working Paper Number 31, December 2002. http://www.brookings.edu/dybdocroot/es/dynamics/papers/bioterrorism.pdf
EUBANK, Stephen. 2002. Scalable, Efficient, Epidemiological Simulation. Los Alamos National Labs. ACM Copyright 2002. http://www.ccs.lanl.gov/ccs5/documents/pdf/2001/LA-UR-01-5513.pdf
REPAST Developers Group. 2003. "RePast Home Page." Web page. Available at http://repast.sourceforge.net
ROOT, Elisabeth Dowling. 2003. "Modeling the impact of climate change on malaria incidence using climate models and agent-based simulation." University of Maryland.
SWARM Developers Group. 2000. "Swarm Home Page." Web page. Available at http://www.swarm.org
WATTS, D. J., and S. H. Strogatz. 1998. Collective dynamics of 'small-world' networks. Nature 393, no. 6684: 440-442.
 Return to Contents of this issue
Return to Contents of this issue
© Copyright Journal of Artificial Societies and Social Simulation, [2004]