
Stephen M. Younger (2003)
Discrete Agent Simulations of the Effect of Simple Social Structures on the Benefits of Resource Sharing
Journal of Artificial Societies and Social Simulation
vol. 6, no. 3
To cite articles published in the Journal of Artificial Societies and Social Simulation, please reference the above information and include paragraph numbers if necessary
<https://www.jasss.org/6/3/1.html>
Received: 18-Dec-2002 Accepted: 7-May-2003 Published: 30-Jun-2003
 Abstract
Abstract
|
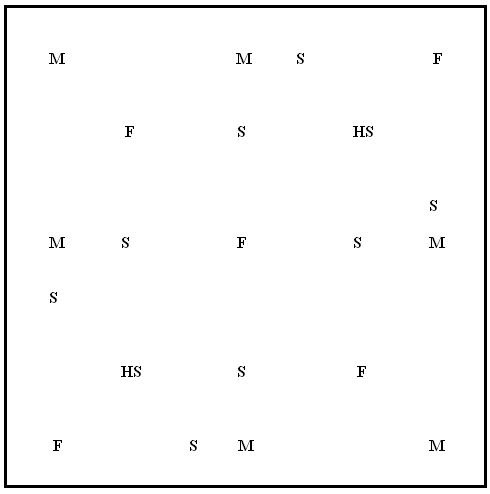
| Figure 1. Landscape for the simulations. F: Food Center; M: Material Center; S: Shelter; HS: Home Shelter. |
| Table 1: Agent Parameters and Method Used in Their Calculation | |
| Age | Increment one unit per timestep |
| Strength | = age - hunger - sleep for age <= 2000 |
| = 2000 - age - hunger - fatigue for age > 2000 | |
| Hunger | Need increased one unit per timestep |
| Decreased by amount of food consumed | |
| Minimum value is zero | |
| Sleep | Need increased by one unit per timestep if awake |
| Set to zero once agent is asleep | |
| Companionship | Need increased by one unit per timestep |
| Set to zero if another agent is present who is awake | |
| Activity | Need increased by one unit per timestep |
| Decreased by one unit if goods collected at food or material center | |
| Decreased by one unit if exploring | |
| Set to zero if goods deposited at home shelter | |
| Decreased by one unit whenever the agent moves | |
| Quality factor | Increased by one unit per timestep |
| Decreased one unit if hunger > 100 | |
| Decreased one unit if sleep > 50 | |
| Decreased one unit if companionship > 48 | |
| Decreased one unit if activity > 96 | |
| Increased five units if new fact sensed | |
| Increased one unit if fact given or received | |
| Increased by twenty percent of goods shared | |
| Increased by ten percent of amount of goods received in sharing event | |
| Decreased by ten percent of goods stolen from this agent | |
| Increased by 100 units on first mating if family enabled | |
| Increased by twenty units per mating | |
| Increased by ten percent of agents deposited at home shelter | |
| Increased by one unit if exploring | |
| imx(i,j) | Increased one point per fact given to another |
| Increased one point per fact received from another | |
| Increased by ten percent of goods received in sharing | |
| Increased by twenty percent of goods given to another | |
| Increased by ten percent of sharing taken from another | |
| Decreased by ten percent of goods taken from self by another | |
| Increased by one hundred points for first mating | |
| Increased by twenty points per mating | |
| Set to 100 for offspring | |
| Set to 90 for parents | |
| Table 2: Results of Simulations for All Agents | |||||||||||||||||
| Scenario | asharing | Births | Births std dev | Deaths | Old Age | OldAge std Dev | Hunger | Hunger std dev | Exhaus tion | Avgpop | Avgqf | Avgqf std dev | Age/ Hunger | Social Welfare | SW std dev | Mat'l | Mat'l std dev |
| MHFL | 0.01 | 1706 | 40 | 1625 | 622 | 26 | 1013 | 42 | 9.6 | 106 | -730 | 52 | 0.61 | -450 | 59 | 2.3x106 | 6.7 x105 |
| M000 | 0.1 | 2159 | 54 | 2070 | 569 | 26 | 1499 | 81 | 2.4 | 109 | 53 | 84 | 0.38 | 22 | 33 | 0 | 0 |
| MH00 | 0.1 | 2114 | 59 | 2026 | 587 | 36 | 1433 | 90 | 6.0 | 108 | 210 | 82 | 0.41 | 89 | 38 | 0 | 0 |
| MH0L | 0.1 | 1953 | 88 | 1681 | 611 | 32 | 1241 | 120 | 8.6 | 107 | 270 | 96 | 0.49 | 140 | 67 | 2.1x106 | 4.5x105 |
| MHF0 | 0.1 | 1696 | 45 | 1612 | 661 | 14 | 943 | 35 | 7.8 | 106 | 210 | 79 | 0.70 | 150 | 0 | 0 | |
| MHFL | 0.1 | 1519 | 68 | 1434 | 733 | 49 | 695 | 120 | 5.4 | 104 | 350 | 148 | 1.1 | 420 | 226 | 2.4x106 | 5.0x105 |
| M000 | 0.5 | 2170 | 73 | 2071 | 630 | 10 | 1439 | 83 | 2.0 | 106 | 1400 | 85 | 0.44 | 610 | 64 | 0 | 0 |
| MH00 | 0.5 | 1890 | 108 | 1797 | 680 | 26 | 1111 | 131 | 5.8 | 105 | 1300 | 60 | 0.61 | 820 | 130 | 0 | 0 |
| MH0L | 0.5 | 1852 | 26 | 1750 | 681 | 9.1 | 1072 | 34 | 8.2 | 106 | 1500 | 27 | 0.64 | 950 | 30 | 2.0x106 | 2.0x105 |
| MHF0 | 0.5 | 1557 | 36 | 1465 | 729 | 27 | 730 | 65 | 6.36 | 105 | 1300 | 55 | 1.0 | 1300 | 190 | 0 | 0 |
| MHFL | 0.5 | 1420 | 64 | 1328 | 783 | 24 | 539 | 86 | 6.2 | 103 | 1400 | 100 | 1.5 | 2100 | 560 | 1.2x106 | 4.4x105 |
| M000 | 0.9 | 2226 | 67 | 2141 | 614 | 19 | 1526 | 83 | 1.0 | 108 | 1600 | 29 | 0.40 | 650 | 56 | 0 | 0 |
| MH00 | 0.9 | 2011 | 50 | 1925 | 655 | 11 | 1261 | 31 | 8.6 | 107 | 1600 | 30 | 0.52 | 830 | 36 | 0 | 0 |
| MH0L | 0.9 | 1911 | 19 | 1842 | 678 | 12 | 1154 | 32 | 11.2 | 106 | 1800 | 71 | 0.59 | 1000 | 50 | 9.1x105 | 2.6x105 |
| MHF0 | 0.9 | 1550 | 44 | 1460 | 731 | 19 | 724 | 64 | 7.6 | 105 | 1600 | 56 | 1.0 | 1600 | 230 | 0 | 0 |
| MHFL | 0.9 | 1477 | 31 | 1389 | 749 | 15 | 634 | 35 | 7.0 | 104 | 1700 | 58 | 1.2 | 2000 | 210 | 5.0x105 | 1.1x105 |
| MHFL | 0.99 | 1439 | 74 | 1338 | 760 | 18 | 573 | 109 | 4.6 | 103 | 1800 | 84 | 1.1 | 2500 | 720 | 5.8x105 | 2.6x105 |
| MHFLx1 | Shelter | 1461 | 85 | 1365 | 743 | 42 | 616 | 140 | 6.1 | 103 | 1200 | 940 | 1.3 | 1700 | 1400 | 2.2x106 | 8.2x105 |
| MHFLx2 | Shelter | 1443 | 120 | 1369 | 747 | 70 | 615 | 190 | 7.0 | 102 | 1520 | 810 | 1.4 | 2100 | 1200 | 1.9x106 | 6.4x105 |
| avgpop: | average population | ||||||||||||||||
| avgqol: | average quality factor for all agents | ||||||||||||||||
| Table 3: Results of simulations for sharing agents | |||||||||
| Scenario | asharing | Sharing Pop | qfsh | qfsh std dev | strsh | comm | comm std dev | share | share std dev |
| MHFL | 0.01 | 1 | 630 | 160 | 520 | 4.2 | 0.21 | 0.0054 | 0.0056 |
| M000 | 0.1 | 10.6 | 1100 | 38 | 800 | 8.0 | 0.18 | 0 | 0 |
| MH00 | 0.1 | 10.8 | 920 | 46 | 790 | 7.0 | 0.11 | 0.00079 | 0.00018 |
| MH0L | 0.1 | 9.7 | 1200 | 120 | 810 | 6.6 | 0.20 | 0.0023 | 0.00039 |
| MHF0 | 0.1 | 10.5 | 1000 | 80 | 840 | 7.1 | 0.10 | 0.0019 | 0.00040 |
| MHFL | 0.1 | 10.5 | 1300 | 180 | 860 | 6.2 | 0.22 | 0.0044 | .00041 |
| M000 | 0.5 | 52.8 | 1500 | 110 | 810 | 7.6 | 0.18 | 0 | 0 |
| MH00 | 0.5 | 53.0 | 1500 | 68 | 830 | 6.3 | 0.16 | 0.0020 | 0.000082 |
| MH0L | 0.5 | 52.7 | 1700 | 20 | 850 | 5.3 | 0.076 | 0.0057 | 0.00019 |
| MHF0 | 0.5 | 51.0 | 1400 | 68 | 860 | 5.8 | 0.15 | 0.0036 | 0.00019 |
| MHFL | 0.5 | 50.4 | 1600 | 110 | 870 | 4.7 | 0.23 | 0.0075 | 0.0011 |
| M000 | 0.9 | 98.1 | 1600 | 27 | 810 | 7.1 | 0.15 | 0 | 0 |
| MH00 | 0.9 | 95.8 | 1600 | 38 | 830 | 5.2 | 0.090 | 0.0061 | 0.00044 |
| MH0L | 0.9 | 95.0 | 1800 | 77 | 840 | 4.1 | 0.17 | 0.011 | 0.0016 |
| MHF0 | 0.9 | 93.6 | 1600 | 63 | 850 | 4.5 | 0.52 | 0.0098 | 0.00050 |
| MHFL | 0.9 | 92.4 | 1700 | 62 | 870 | 3.8 | 0.11 | 0.013 | 0.0015 |
| MHFL | 0.99 | 102 | 1800 | 82 | 880 | 3.5 | 0.30 | 0.025 | 0.012 |
| MHFLx 1 | By Shelter | 37.1 | 1400 | 300 | 700 | 2.9 | 0.78 | 0.0075 | 0.0035 |
| MHFLx 2 | By Shelter | 44.3 | 1500 | 400 | 690 | 3.1 | 1.5 | 0.014 | 0.0093 |
| qfsh: | average quality factor of sharing agents | ||||||||
| strsh: | average strength of sharing agents | ||||||||
| comm.: | communication rate for sharing agents | ||||||||
| share: | sharing rate for sharing agents | ||||||||
| Table 4: Results of Simulations for Non-sharing agents | |||||||
| Scenario | asharing | Non-sharing Pop | qfns | qfns std dev | strns | steal | steal std dev |
| MHFL | 0.01 | 105 | -740 | 49 | 860 | 0.0035 | 0.00012 |
| M000 | 0.1 | 98.0 | -58 | 88 | 820 | 0 | 0 |
| MH00 | 0.1 | 97.5 | 130 | 80 | 830 | 0.0020 | 0.000035 |
| MH0L | 0.1 | 97.4 | 180 | 88 | 840 | 0.0028 | 0.000044 |
| MHF0 | 0.1 | 95.2 | 120 | 77 | 860 | 0.0027 | 0.000055 |
| MHFL | 0.1 | 94.0 | 250 | 140 | 870 | 0.0034 | 0.00014 |
| M000 | 0.5 | 54.9 | 1300 | 63 | 830 | 0 | 0 |
| MH00 | 0.5 | 52.5 | 1200 | 53 | 850 | 0.0026 | 0.000053 |
| MH0L | 0.5 | 53.5 | 1300 | 17 | 860 | 0.0030 | 0.0030 |
| MHF0 | 0.5 | 53.9 | 1100 | 48 | 870 | 0.0033 | 0.000053 |
| MHFL | 0.5 | 52.6 | 1200 | 86 | 880 | 0.0037 | 0.00012 |
| M000 | 0.9 | 10.2 | 1500 | 63 | 810 | 0 | 0 |
| MH00 | 0.9 | 11.4 | 1400 | 26 | 850 | 0.0046 | 0.00018 |
| MH0L | 0.9 | 11.2 | 1500 | 57 | 850 | 0.0036 | 0.00027 |
| MHF0 | 0.9 | 11.2 | 1500 | 27 | 890 | 0.0052 | 0.00019 |
| MHFL | 0.9 | 11.7 | 1500 | 70 | 880 | 0.0044 | 0.00023 |
| MHFL | 0.99 | 1.1 | 1100 | 285 | 600 | 0.0028 | 0.00081 |
| MHFLx 1 | By Shelter | 66.1 | 240 | 420 | 793 | 0.0036 | 0.00064 |
| MHFLx 2 | By Shelter | 55.1 | 330 | 567 | 746 | 0.0035 | 0.00085 |
| qfns: | average quality factor of non-sharing agents | ||||||
| strns: | average strength of non-sharing agents | ||||||
| steal.: | stealing rate for non-sharing agents | ||||||
|
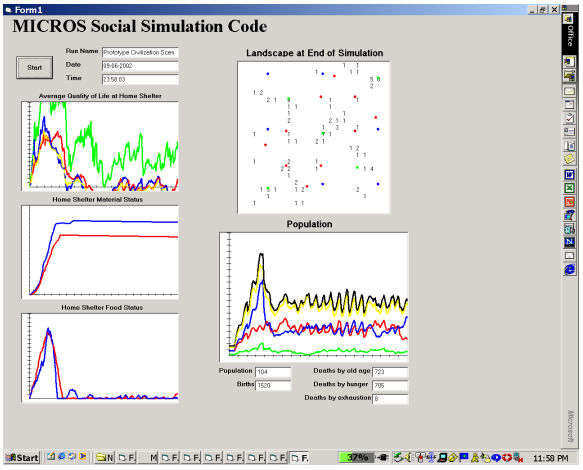
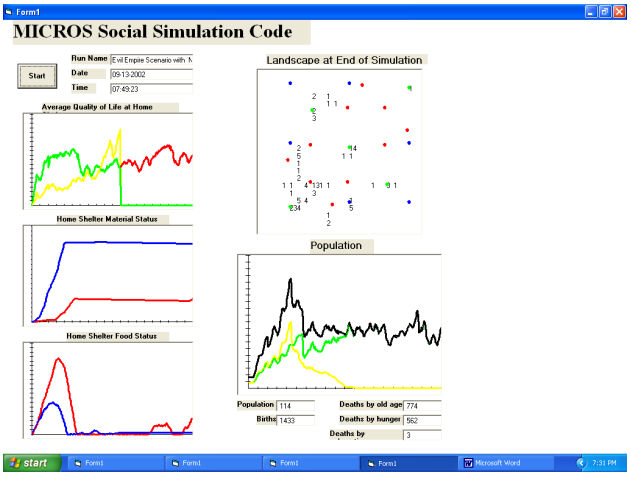
| Figure 2. Output screen for MHFL run 83 with asharing=0.1. Red curves correspond to the home shelter at 5,5 and blue curves correspond to the home shelter at 15,15. Green signifies sharing agents and yellow non-sharing agents. The black curve is the total population. The home shelters have equal populations. Note the buildup of food surpluses during the population buildup phase. The population increases until the surplus is depleted and then collapses to a sustainable level. Stability is achieved after about three generations. Material collection is done mainly during the food surplus phase. Note the erratic nature of the quality factor for this low value of asharing. |
|
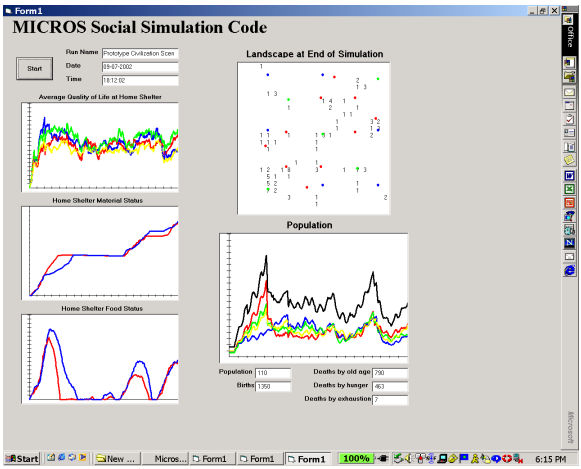
| Figure 3. Output screen for MHFL run 88 with asharing=0.5. Red curves correspond to the home shelter at 5,5 and blue curves correspond to the home shelter at 15,15. Green signifies sharing agents and yellow non-sharing agents. The black curve is the total population. The home shelters have equal populations. There are several peaks in the total population corresponding to peaks in the food supply. Since the food replenishment rate is constant, this is due to a series "feast and starve" cycles wherein the population exceeds the ability for the food supply to sustain and then drops below that level. Material collection is done when there are food surpluses at the home shelters, as the leader must first ensure that the agents are fed before he or she can issue orders for material collection. The quality factor for all subpopulations follows the same temporal trend. |
|
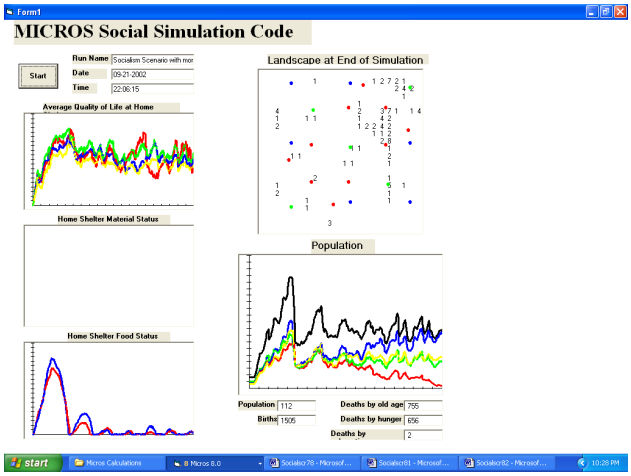
| Figure 4. Output screen for MHF0 scenario run 83 with asharing=0.5. Red curves correspond to the home shelter at 5,5 and blue curves correspond to the home shelter at 15,15. Green signifies sharing agents and yellow non-sharing agents. The black curve is the total population. The home shelter at 5,5 (red) experienced a continuous decline in population in the latter half of the run. There is no material collection in the MHF0 Scenario. |
|
| Figure 5. Output screen for MHFLx scenario run 39. Red curves correspond to the sharing agent home shelter at 5,5 and blue curves correspond to the non-sharing agent home shelter at 15,15. Green signifies sharing agents and yellow non-sharing agents. The black curve is the total population. The population of the non-sharing shelter declines to zero by the middle of the run. The sharing agent shelter accumulated more food during the initial phase of the run but the non-sharing agent shelter accumulated more materials. Note the clustering of agents near the sharing agent home shelter in the snapshot of the landscape at the end of the run. |
|
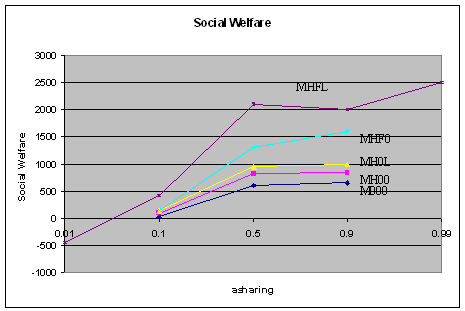
| Figure 6. Social welfare factor, defined as the product of the quality factor times the ratio (agent deaths due to old age / agent deaths due to hunger). |
CASTELFRANCHI C, Conte R and Paolucci M (1998), Normative Reputation and the Costs of Compliance. Journal of Artificial Societies and Social Simulation 1(3).
CECCONI F and Parisi D1998), Individual versus Social Survival Strategies. Journal of Artificial Societies and Social Simulation 1 (2).
DANIELSON P (1998) Modeling Rationality, Morality, and Evolution. New York: Oxford Press.
DEAN JS, Gumerman, GJ, Epstein, JM, Axtell, RL, Swedlund, AC, Parker, MT, and McCarroll, S (1999) "Understanding Anasazi Culture Change Through Agent-Based Modeling". In Kohler T and Gumerman, G (Eds.), Dynamics in Human and Primate Societies, New York: Oxford University Press.
JAFFE K (2002) An Economic Analysis of Altruism: Who Benefits from Altruistic Acts? Journal of Artificial Societies and Social Simulation 5 (3).
MACY MW and Willer W (2002) From Factors to Actors: Computational Sociology and Agent-Based Modeling, Annual Review of Sociology 28, 143-166.
SAAM N J and Harrier A (1999) Simulating Norms, Social Inequality, and Functional Change in Artificial Societies. Journal of Artificial Societies and Social Simulation 2, (1).
TESTART A (1982) The Significance of Food Storage among Hunter-Gatherers: Residence Patterns, Population Densities, and Social Inequalities, Current Anthropology 23, 523-537.
YOUNGER S M (2002) Discrete Agent Modeling as a Tool For the Study of Individual and Social Development: The MICROS Code (Version 8.0), Los Alamos National Laboratory Report LA-UR-02-7009http://lib-www.lanl.gov/cgi-bin/getfile?00852082.pdf.
 Return to Contents of this issue
Return to Contents of this issue
© Copyright Journal of Artificial Societies and Social Simulation, [2003]