
Arianna Dal Forno and Ugo Merlone (2002)
A multi-agent simulation platform for modeling perfectly rational and bounded-rational agents in organizations
Journal of Artificial Societies and Social Simulation
vol. 5, no. 2
To cite articles published in the Journal of Artificial Societies and Social Simulation, please reference the above information and include paragraph numbers if necessary
<https://www.jasss.org/5/2/3.html>
Received: 23-Dec-2001 Accepted: 20-Feb-2002 Published: 31-Mar-2002
 Abstract
Abstract|
|
where ei is agent i's effort. This formulation satisfies the common assumptions we stated.
|
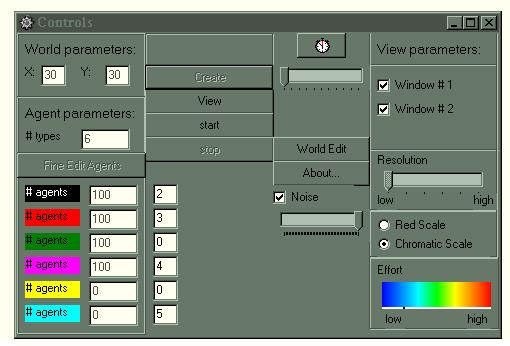
| Figure 1. The main window with controls for the simulation parameters |
|
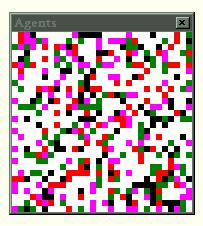
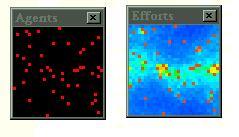
| Figure 2. The toroidal grid with agents (different colours representing different types and behaviours of agents) |
|
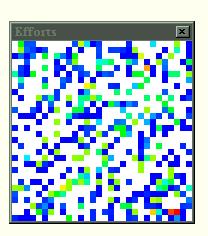
| Figure 3. Efforts window with agents' effort displayed with a chromatic scale |
|
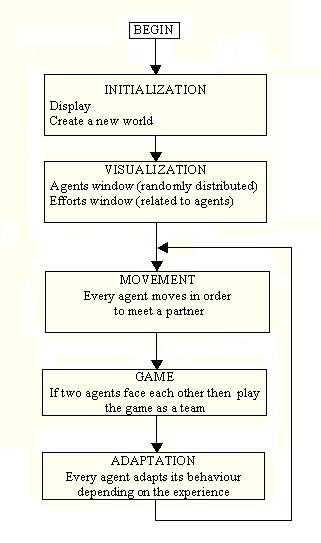
| Figure 4. General structure of the simulation |
Initially, according to world parameters (chosen by user) agents are randomly distributed on the grid. Each agent's initial effort is determined accordingly to their type; for most types of agents initial effort is determined randomly. Agents' position and effort may be observed on the relative display window. At every round each agent moves randomly in order to meet a partner and form a team. The only constraint on possible movement is that no more than one agent may stay in a cell of the grid.
class Agent {
public:
Agent(int _type = 0 );
~Agent();
void RandAgent(int* grid, int modx, int mody, int num);
void RandMove(int* grid, int modx, int mody);
void WorkAgent(float parteff);
void RandDir();
protected:
private:
int type; // type of agent
int posx; // x position on the grid
int posy; // y position on the grid
int dir; // direction N=1, E=2, S=3, W=4, No Interact=0
int step; // allowed motion
int col; // effort colour
int colt; // type colour
int evol; // the type of evolution the agent has reached
int numinc; // number of interactions;
double effort; // current effort
double profit; // current profit
double cumprof; // cumulated profit
double leffort; // last effort provided by agent
double cumeffort; // cumulated partner effort
double lprofit; // last profit
double aeffort; // last antagonist effort
double aprofit; // last antagonist profit
double neffort; // neighbourhood average effort
double nprofit; // neighbourhood average profit
};
|
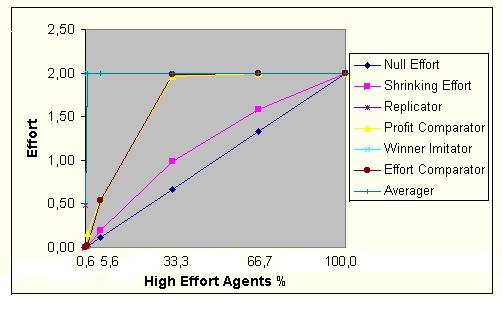
| Figure 5. Local effects prevent the emergence of a corporate culture |
| Table 1: Average effort introducing high effort agents in a population of null effort agents | ||||||
| % High Effort | 0.0% | 0.6% | 5.6% | 33.3% | 66.7% | 100.0% |
| Expected Effort | 0.00010 | 0.01122 | 0.11126 | 0.66707 | 1.33403 | 2.00100 |
| Observed Effort | 0.00010 | 0.01092 | 0.12283 | 0.67948 | 1.32605 | 2.00100 |
| Table 2: Average effort introducing high effort agents in a population of shrinking effort agents | ||||||
| % High Effort | 0.0% | 0.6% | 5.6% | 33.3% | 66.7% | 100.0% |
| Expected Effort | 0.00010 | 0.01122 | 0.11126 | 0.66707 | 1.33403 | 2.00100 |
| Observed Effort | 0.00010 | 0.01235 | 0.20056 | 0.98380 | 1.58420 | 2.00100 |
|
| Figure 6. The effect of high effort agents on bounded rationality agents |
| Table 3: Average effort introducing high effort agents into a population of rational agents | ||||||
| % High Effort | 0.0% | 0.6% | 5.6% | 33.3% | 66.7% | 100.0% |
| Expected Effort | 0.92101 | 0.92701 | 0.98101 | 1.28100 | 1.64100 | 2.00100 |
| Observed Effort | 0.92101 | 0.92823 | 0.97348 | 1.25872 | 1.59225 | 2.00100 |
|
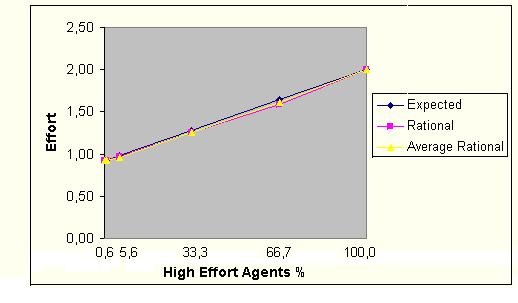
| Figure 7. The effect of high effort agents on rational agents |
|
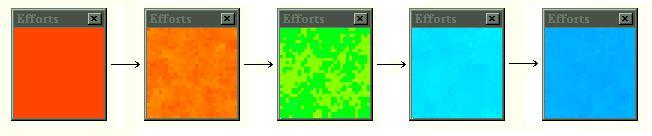
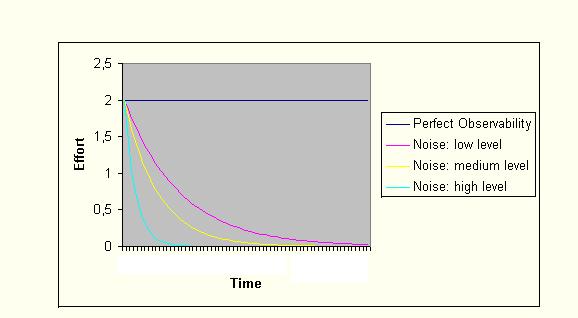
| Figure 8. Effects of noise on a simple population |
|
| Figure 9. Noise effects on a winner imitators population |
|
| Figure 10. Rational agents shirk when interacting with high effort agents |
2 Obviously, it is possible to implement a different profit function.
3 The .exe program and the agent class code is available upon request from the authors.
4 The reader will note that in our model interaction depends on the location of agents. The principal may mitigate the random interaction effects by an optimal location of agents. But this cannot be done without knowing the agents' types: a vicious circle arises.
5 For numerical reasons null effort agents actually exert an almost null effort: 0.0001.
6 The only exception is a rational agents population. See Dal Forno and Merlone (2001) for theoretical details and 6.16.
CARLEY K M and Prietula M J Eds. (1994), Computational Organization Theory. Hillsdale, New Jersey: Lawrence Erlbaum Associates, Publishers.
COHEN M D, March J G and Olsen J P (1972), A Garbage Can Model of Organizational Decision Making. Administrative Science Quarterly, 17. pp. 1-25.
DAL FORNO A and Merlone U (2001), Incentive Policy and Optimal Effort: Equilibria in Heterogeneous Agents Populations, Quaderni del Dipartimento di Statistica e Matematica Applicata, n.10.
HARRISON J R and Carrol G R (1991), Keeping the Faith: A Model of Cultural Transmission in Formal Organizations. Administrative Science Quarterly, 36(3). pp. 552-582.
HARRISON J R and Carrol G R (2001), Modeling Organizational Culture: Demography and Influence Networks. In Cooper C L, Cartwright S and Earley P C (Eds.), The International Handbook of Organizational Culture and Climate, Chichester, UK: John Wiley & Sons.
HERMALIN B E (2001), Economics and Corporate Culture. In Cooper C L, Cartwright S and Earley P C (Eds.), The International Handbook of Organizational Culture and Climate, Chichester, UK: John Wiley & Sons.
KREPS D M (1990), Corporate culture and economic theory. In Alt J E and Shepsle K A (Eds.), Perspectives on Positive Political Economy, Cambridge: Cambridge University Press, pp. 91-143.
MACHO-STADLER I and Pérez-Castrillo D (1997), An Introduction to the Economics of Information (Incentive and Contracts). Oxford: Oxford University Press.
MARSCHAK J and Radner R (1972), Economic Theory of Teams. New Haven, Conn.: Yale University Press.
MEYERSON R (1991), Game Theory. Cambridge Massachusetts: Harvard University Press.
MORRIS S (1997), Interaction Games: a Unified Analysis of Incomplete Information, Local Interaction and Random Matching. Working Paper. University of Pennsylvania.
RADNER R (1992), Hierarchy: The Economics of Managing. Journal of Economic Literature, Vol. XXX. pp.1382-1415.
RUBINSTEIN A (1998), Modeling Bounded Rationality. Cambridge Massachusetts: the MIT Press.
SIMON H A (1955), A Behavioral Model of Rational Choice, The Quarterly Journal of Economics, 69(1). pp. 99-118.
SIMON H A (1982), Models of Bounded Rationality, vol.2 Behavioral Economics and Business Organization. Cambridge Massachusetts: MIT Press.
STEERS R M and Black J S (1994), Organizational Behavior. Fifth Edition, New York, NY: HarperCollins College Publishers.
YOUNG H P (1993) The Evolution of Conventions, † Econometrica, Vol. 61, No. 1., pp. 57-84.
YOUNG H P (2001), Individual Strategy and Social Structure. Princeton, NJ: Princeton University Press.
 Return to Contents of this issue
Return to Contents of this issue
© Copyright Journal of Artificial Societies and Social Simulation, [2002]