
Explaining Simulations Through Self Explaining Agents
Journal of Artificial Societies and Social Simulation
12 (3) 6
<https://www.jasss.org/12/3/6.html>
For information about citing this article, click here
Received: 20-Mar-2009 Accepted: 03-May-2009 Published: 30-Jun-2009

 Abstract
Abstract
|
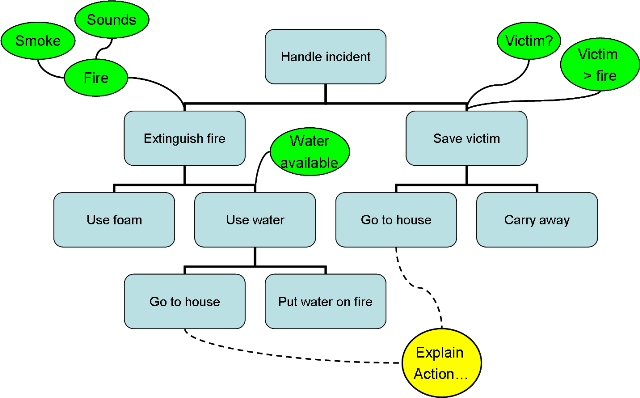
| Figure 1. BDI-model of a firefighter agent |
I use foam, because
I want to Handle incidents and I believe there is Fire
therefore I want to Extinguish fire and
because there is no Water available I use foam
I Go to house because I believe there is a Victim and Safe Victim > Extinguish fire
handle incident ← explosion danger | extinguish fire handle incident ← victim | save victim handle incident ← fire | extinguish fire
handle incident ← fire | extinguish fire handle incident ← victim | save victim handle incident ← explosion danger | extinguish fire
if (not explosion danger) then
if (victim) then
save victim
end
if (fire) then
extinguish fire
end
else if (explosion danger) then
extinguish fire
if (victim) then
save victim
end
end
|
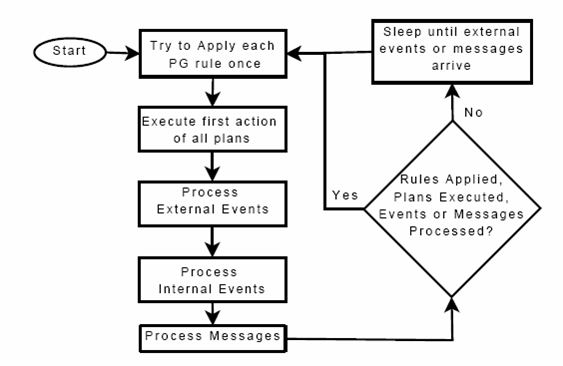
| Figure 2. The deliberation cycle of a 2APL agent |
OriginalPlan ← victim | saveVictim ; OriginalPlan
OriginalPlan ← victim | <saveVictim; UpdateBelief(not victim)> ; OriginalPlan
fire :- smoke, sounds. handle incident ← victim | save victim handle incident ← fire | extinguish fire extinguish fire ← (water and fire) | use water extinguish fire ← (no water and fire) | <use foam; UpdateBelief(no fire)> use water ← (water and fire) | <go to house; UpdateBelief(at house)> ; <water on fire; UpdateBelief(no fire)> save victim ← true | <go to house; UpdateBelief(at house)> ; <carry away; UpdateBelief(no victim)> OriginalPlan ← victim | <saveVictim; UpdateBelief(not victim)> ; OriginalPlan
BORDINI R, Hubner J, and Wooldridge M (2007) Programming multi-agent systems in AgentSpeak using Jason. Wiley.
BRAZIER F, Dunin-Keplicz B, Jennings N, and Treur J (1997) Modelling multi-agent systems in a compositional formal framework. Cooperative Information Systems 6 (1).
CORE M, Traum T, Lane H, Swartout W, Gratch J, and Van Lent M (2006) Teaching negotiation skills through practice and reflection with virtual humans. Simulation 82 (11).
DASTANI M (2008) 2APL: a practical agent programming language. Autonomous agents and multi-agent systems 16 (3), pp. 214-248.
DE GIACOMO G, Lesperance Y, and Levesque H (2000) ConGolog, a concurrent programming language based on the situation calculus. Artificial Intelligence 121 (1-2), pp. 109-169.
GOMBOC D, Solomon S, Core M G, Lane H C, and Van Lent M (2005) Design recommendations to support automated explanation and tutoring. Proceedings of the Fourteenth Conference on Behavior Representation in Modeling and Simulation, Universal City, CA.
JOHNSON W L (1994) Agents that learn to explain themselves. Proceedings of the Twelfth National Conference on Artificial Intelligence, pp 1257-1263.
LESSER V, Decker K, Carver N, Garvey A, Neiman D, Prasad N M, and Wagner T (2004) Evolution of the GPGP/TAEMS domain-independent coordination framework. Autonomous agents and multi-agent systems 9, pp 87-143.
NORLING E (2003) Capturing the quake player: using a bdi agent to model human behaviour. In Rosenschein J S, Sandholm T, Wooldridge M, and Yokoo M (Eds.) Proceedings of AAMAS 2003. pp 1080-1081.
RAO A and Georgeff M (1991) Modeling rational agents within a BDI-architecture. In Allen J, Fikes R, and Sandewall E (Eds.) Proceedings of the 2nd International Conference on Principles of Knowledge Representation and Reasoning, San Mateo, CA, USA, Morgan Kaufmann publishers Inc. pp. 473-484.
REYNOLDS C (1987) Flocks, herds, and schools: A distributed behavioral model. Computer Graphics 21 (4) pp 25-34.
ROSENBLOOM P, Laird J, and Newell A (1993) The Soar Papers: Readings on Integrated Intelligence. MIT Press, Cambridge.
RUSSELL S and Norvig P (2003) Artificial Intelligence A Modern Approach. Pearson Education, Inc., New Jersey, USA, second edition.
VAN LENT M, Fisher W, and Mancuso M (2004) An explainable artificial intelligence system for small-unit tactical behavior. Proceedings of IAAA 2004, Menlo Park, CA, AAAI Press.
YE R, and Johnson P (1995) The impact of explanation facilities on user acceptance of expert systems advice. Mis Quarterly 19 (2) pp. 157-172.
 Return to Contents of this issue
Return to Contents of this issue
© Copyright Journal of Artificial Societies and Social Simulation, [2009]