
Kees Zoethout, Wander Jager and Eric Molleman (2006)
Simulating the Emergence of Task Rotation
Journal of Artificial Societies and Social Simulation
vol. 9, no. 1
<https://www.jasss.org/9/1/5.html>
For information about citing this article, click here
Received: 18-Apr-2005 Accepted: 13-Oct-2005 Published: 31-Jan-2006

 Abstract
Abstract
|
| Figure 1a. The system and its environment |
The model is a simple input-process-output model (see Figure 1a). The input is a task. As we stated above, a task consists of a number of actions and a number of cycles. Some organisations offer a higher degree of freedom in the self-organising allocation process than others. For instance, in some organisations the agents are allowed to rotate tasks whenever they want, in others only once a day, or not at all. In the model this is represented as rotation frequency, i.e. the number of possible rotations of one task. The output of the system is the task that has been performed. The performance of the system, which is one of the dependent variables, indicates how well the agents have performed the task. The performance is based on expertise and motivation, the other two dependent variables, and the way in which the task has been allocated. It is expressed as the total time that the system needs to perform the task.
|
| Figure 1b. The System |
IF Expertise > ExpertiseThreshold AND Motivation > MotivationThreshold THEN I DO ELSE YOU DO
|
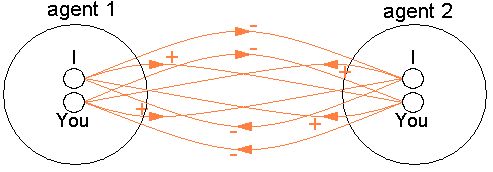
| Figure 2. Excitation (+) and inhibition (-) of two agents |
With every action, the I-node of one agent inhibits the I-node of the other(s) and excitates the You-node of the other(s). The You-node of one agent inhibits the You-node of the other(s) and excitates the I-node of the other(s). If the I-node of an agent is bigger than the You-node, the choice of the agent is 'I Do', otherwise it is 'You-do'.
| (1a) | I2 := I2 - I1I2DiffII | :I1 inhibits I2 |
| (1b) | You2 := You2 - You1You2DiffYouYou | : You1 inhibits You2 |
| (1c) | You2 := You2 + (1 - You2)I1DiffII | : I1 excitates You2 |
| (1d) | I2 := I2 + You1(1 - I2)DiffYouYou | : You1 excitates I2 |
|
(2a) |
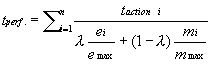
λ represents a parameter that determines the balance between expertise and motivation (0.5 in all of our experiments). In the present study, the agents perform the actions simultaneously. This means that the time it takes to perform the total task, tperf., is determined by the slowest agent.
|
|
(3a) |
Forgetting is the inverse of learning, therefore:
|
|
(3b) |
whereby ν[0,1] determines the forget speed.
| IF (Iagentiskillk - You agentiskillk) > (Iagentjskillk - You agentjskillk) THEN agenti performs skillk | (4) |
| Table 1: Experimental design | ||
| Organisation type | Boredom/Recovery | Rotation Frequency |
| No Self-organisation | High (100/100) | NONE |
| Moderate (50/50) | ||
| Low (29/29) | ||
| Semi Self-organisation | High | 1/5, 1/25, 1/50, 1/75 |
| Moderate | 1/5, 1/25, 1/50, 1/75 | |
| Low | 1/5, 1/25, 1/50, 1/75 | |
| Self-Organisation | High | NOT MANIPULATED |
| Moderate | ||
| Low | ||
| Table 2: Initial setting of the agents in all experiments | |||||
| Agent 1 | Agent 2 | Agent 3 | Agent 4 | Agent 5 | |
| Skill 1 | 11 | 12 | 13 | 14 | 15 |
| Skill 2 | 12 | 13 | 14 | 15 | 11 |
| Skill 3 | 13 | 14 | 15 | 11 | 12 |
| Skill 4 | 14 | 15 | 11 | 12 | 13 |
| Skill 5 | 15 | 11 | 12 | 13 | 14 |
|
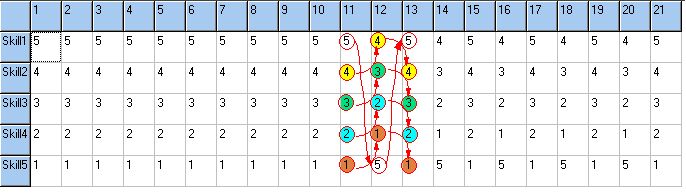
| Table 3. An example of task allocation |
|
| Figure 4.1a. Expertise in case of self-organisation |
|
| Figure 4.1b. Motivation in case of semi self-organisation |
|
| Figure 4.1c. Performance time in case of semi-self-organisation |
|
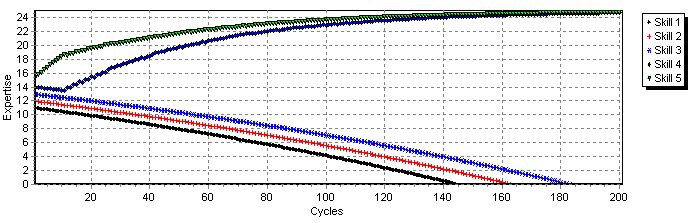
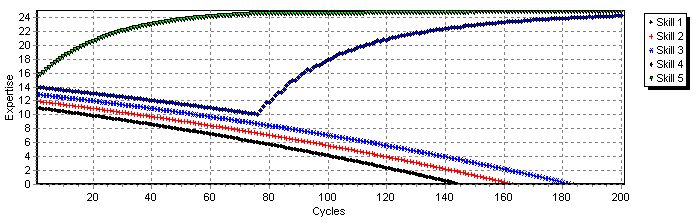
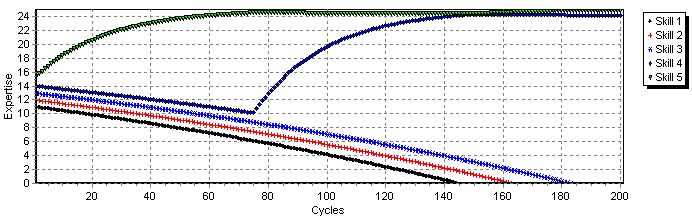
| Figure 4.2a. Expertise development in a situation with a low degree of boredom |
Here we see that, initially, the agents seem to specialise in one skill. However, at the 77th cycle, they develop expertise in the second skill. This is 'right on time', because the expertise in the second best skill has almost dropped below its threshold of 10. This explains why a boredom-recovery rate less than 29 will not result in a task rotation process.
|
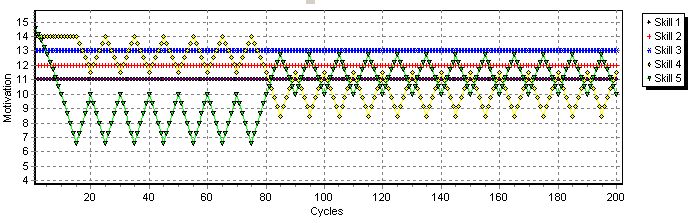
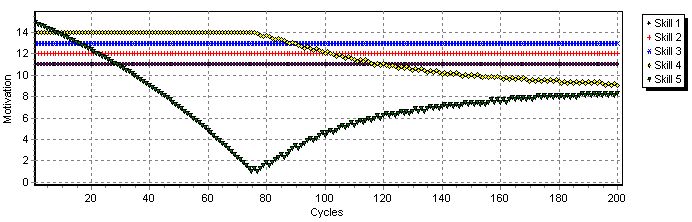
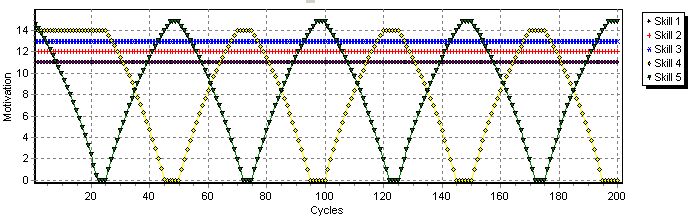
| Figure 4.2b. Motivation in the situation with a low boredom rate |
After the first rotation at the 77th cycle, we see that the motivation for the skill that was initially performed the best increases again, whereas the motivation of the second best skill decreases.
|
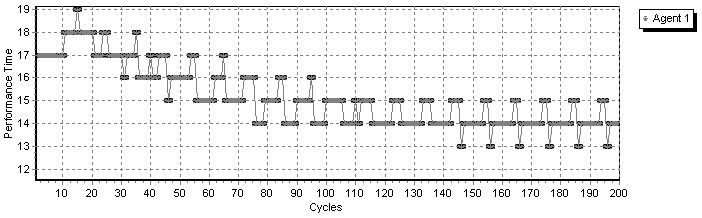
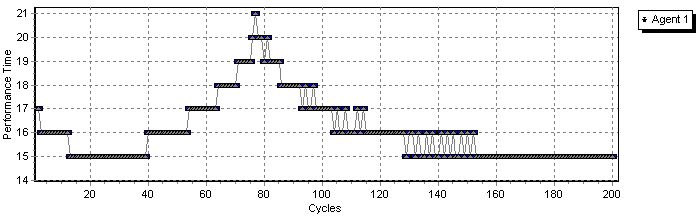
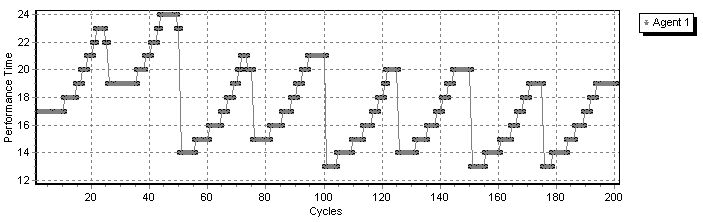
| Figure 4.2c. Performance time in a situation with a low boredom rate |
|
| Figure 4.3a. Expertise development at a rotation frequency of 25 |
|
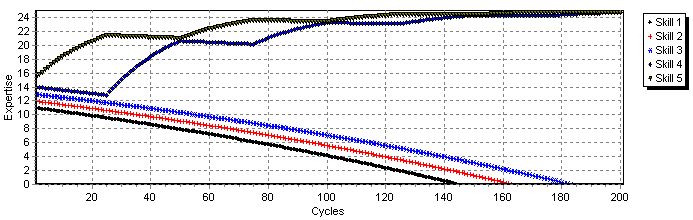
| Figure 4.3b. Expertise development at a rotation frequency of 75 |
Figure 4.3b shows a process comparable to the one depicted in Figure 4.2a. The decrease in the rotation frequency results in the same effect as the decrease in boredom/recovery does: because the first moment of task rotation occurs quite late, either because of a low boredom rate or a low rotation frequency, the agents have more time to specialise in one skill and forget the second. This implies that if we would lower the rotation frequency even further, the agents forget their second best skill at a level below the threshold of 10, and as a result end up specialising in only one skill. As Figure 4.2a indicates, a setting with a rotation frequency lower than 1/77 would actually lead to this outcome.
|
| Figure 4.3c. Motivation at a rotation frequency of 25 |
We see that the skill with the highest motivation rate (green) starts decreasing, reaches zero at the 22nd cycle and maintains this level until the next rotation at the 26th cycle. Then, the motivation increases again until it reaches its original value at the 47th cycle. Simultaneously, the agent uses its second best skill (brown), following the same periodicity as the highest skill.
|
| Figure 4.3d. Performance time at a rotation frequency of once every 25 cycles |
During the first period of 25 cycles, expertise is build up in the best skill, but boredom will nevertheless cause an increase in the performance time. After the task rotation at the 25th cycle, the performance time starts at a lower level because now the agent uses its second best skill. During the first 25 cycles the expertise in this skill dropped resulting in a higher initial start level of the performance time and a higher level at the end of the second period at the 50th cycle (see also Figure 4.3a). Nevertheless, the expertise in both skills has increased over 20, causing the performance time in each period to start from value 14 from the 51st cycle, after which as a result of boredom it increases until it reaches the value of 21. Then the agents rotate, the performance time shifts back to its lowest level and the same process starts all over again. The differences in performance time at the start of every period (1st, 26th, 51st, etc,) decrease because the differences of the best and the second best skill will decrease once they have both reached their maxima (see also Figure 4.3a).
COHEN, S.G., Ledford, G.E., and Spreitzer, G.M. (1996), A predictive model of self-managing work team effectiveness, Human Relations,Vol. 49, No. 5.
DALENOORT, G.J. (1989) The paradigm of self-organization: studies of autonomous systems, in G.J. Dalenoort (ed.), The Paradigm of Self-Organization, 1-22, Gordon and Breach, London
DALENOORT, G.J. (1995) Computation and self-organization in the brain, Cognitive Systems, 4-2, 217-231
EMERY, F.E. & Trist, E.L. (1960), Socio-technical systems, in C.W. Churchman & M. Verhulst (eds.) Management Science, Models and Techniques, vol. 2, Pergamon, pp. 83-97
HACKMAN, R. J. & Oldham, G. R. (1980) Work Redesign, Addison-Wesley Publishing Company, Reading Massachusetts etc.
HACKMAN, J.R. & Morris, C.G. (1975), Group tasks, group interaction process and group performance effectiveness: A review and propose integration. In L. Berkowitz (Ed.), Advances in experimental social psychology, Vol. 8, pp. 45-99, New York: Academic Press.
HERBST, P.G. (1974). Sociotechnical Design. London: Tavistock
HEYLIGHEN, F. (1997), Self-Organization, Emergence and the Architecture of Complexity, in: F. Heylighen, C. Joslyn and V. Turchin (Eds.): Principia Cybernetica Web (Principia Cybernetica, Brussels), ftp://ftp.vub.ac.be/pub/projects/Principia_Cybernetica/Papers_Heylighen/Self-Organization_Complexity.txt
HUNT, R.G. (1976), On the Work itself: Observations Concerning Relations between Tasks and Organizational Processes, in: E.J. Miller (ed.), Task and Organization, Tavistock Institute of Human Relations, John Wiley & Sons, London [etc.]
KERCKHOFF, A.C. & Davis, K.E. (1962) Value consensus and need complementarity in mate selection. American Sociological Review 27, 295-303
KUIPERS, H. (1989), Zelforganisatie als ontwerpprincipe. Sociotechnisch organisatieontwerp in vijftien stellingen, Gedrag en organisatie. Vol. 2, 4/5. Pp. 199-221
MOLLEMAN, E. (2005). Diversity in Demographic Characteristics, Abilities and Personality Traits: Do Faultlines Affect Team Functioning? Group Decision and Negotiation.14, 173-193.
MORGAN, G. (1986). Images of organizations. Beverley Hills: Sage Publications
NEMBHARD, D.A. (2000), The Effects of Task Complexity and Experience on Learning and Forgetting: A Field Study, Human Factors, vol. 42, issue 2, p272
STEINER, I.D. (1972), Group process and productivity, Academic Press, Inc, New York and London
TSCHAN, F. and Cranach, M. von (1996), Group Task Structure, Processes and Outcome, M.A.West (Ed), Handbook of Work Group Psychology, New York: John Wiley & Sons Ltd
VAN DEN BEUKEL, A.L. (2003), Task Flexibility in Team-Based Work: a Multilevel Investigation into Outcomes and Practices, Doctoral Thesis Groningen: University of Groningen, Faculty of Management and Organziation
VAN DER VEGT, G. S., & Van de Vliert, E. (2005). Effects of perceived skill dissimilarity and task interdependence on helping in work teams. Journal of Management, 31(1), 73- 89.
WEICK, K. (1979), The Social Psychology of Organizing, 2nd ed., McGraw-Hill, New York, NY.
WILKE, H.A.M. and Meertens, R.W. (1994), Group Performance, Routledge, London, New York
ZOETHOUT, K., Jager, W, & Molleman, E., (2004), Self-organising social processes of task allocation, Cognitive Systems vol 6, special issue on the multidisciplinary aspects of learning.
ZOETHOUT, K., Jager, W, & Molleman, E., (in press), Formalizing Self-Organizing Processes of Task Allocation, Simulating Modelling Practice and Theory, special issue on Simulating Organisational Processes.
 Return to Contents of this issue
Return to Contents of this issue
© Copyright Journal of Artificial Societies and Social Simulation, [2006]